Paper:
Wrong Fix Detection for RTK Positioning Based on Relative Position Between Multiple Antennas
Tomohito Takubo, Masaya Sato, and Atsushi Ueno
Osaka Metropolitan University
3-3-138 Sugimoto, Sumiyoshi-ku, Osaka, Osaka 558-8585, Japan

We propose a methodology that uses the relative positional information of multiple antennas to estimate the Wrong Fix, which refers to an erroneous determination of the carrier-phase ambiguity utilized in GNSS satellites. The proposed approach is based on the fundamental notion that the mutual positional relationship of multiple antennas mounted on a mobile robot remains constant, and it uses machine-learning techniques based on the relative position information among the antennas to identify instances of Wrong Fixes. The relative distance between the antennas is derived from the real-time kinematic (RTK) position information of each antenna. The confidence level of the RTK positioning results was calculated using logistic regression, considering the measurement error with respect to the true value. To determine the Wrong Fixes, a labeled dataset was constructed, indicating that data were categorized as wrong fixes when the error from the true value exceeded 0.1 m. This dataset served as the training database for the logistic regression model. Experimental results demonstrate that the proposed methodology effectively reduced the root mean squared error between the measured location, classified as fixed by a trained discriminator, and the true value.
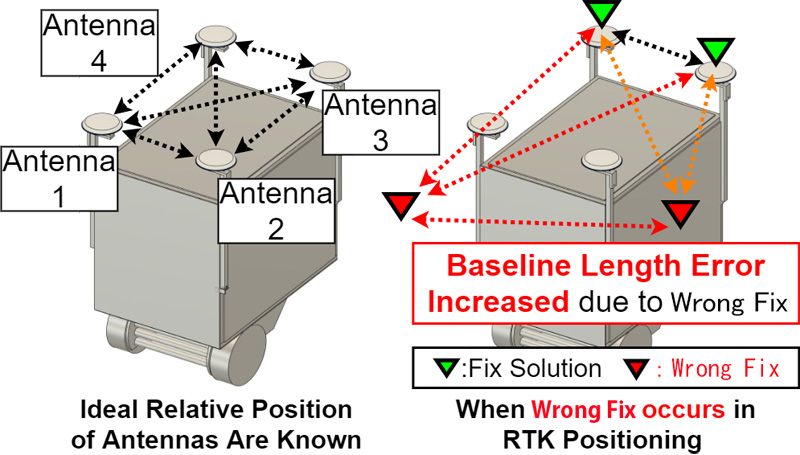
Proposed method
- [1] T. Tsubouchi, “Introduction to Simultaneous Localization and Mapping,” J. Robot. Mechatron., Vol.31, No.3, pp. 367-374, 2019. https://doi.org/10.20965/jrm.2019.p0367
- [2] Y. Hara, T. Tomizawa, H. Date, Y. Kuroda, and T. Tsubouchi, “Tsukuba Challenge 2019: Task Settings and Experimental Results,” J. Robot. Mechatron., Vol.32, No.6, pp. 1104-1111, 2020. https://doi.org/10.20965/jrm.2020.p1104
- [3] L. Yang, H. Guo, S. Yang, Y. Hoshino, S. Suzuki, D. Gao, and Y. Cao, “Generation of a High-Precision Digital Elevation Model for Fields in Mountain Regions Using RTK-GPS,” Int. J. Automation Technol., Vol.13, No.5, pp. 671-678, 2019. https://doi.org/10.20965/ijat.2019.p0671
- [4] X. Han, X. Zhang, and Y. Liu, “Improving GNSS Navigation and Control with Electronic Compass in Unmanned System,” J. Adv. Comput. Intell. Intell. Inform., Vol.23, No.3, pp. 427-436, 2019. https://doi.org/10.20965/jaciii.2019.p0427
- [5] A. Geiger, P. Lenz, and R. Urtasun, “Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite,” IEEE Conf. on Computer Vision and Pattern Recognition, pp. 3354-3361, 2012. https://doi.org/10.1109/CVPR.2012.6248074
- [6] A. Takanose, Y. Atsumi, K. Takikawa, and J. Meguro, “Improvement of Reliability Determination Performance of Real Time Kinematic Solutions Using Height Trajectory,” Sensors, Vol.21, Issue 2, Article No.657, 2021. https://doi.org/10.3390/s21020657
- [7] G. Huang, S. Du, and D. Wang, “GNSS techniques for real-time monitoring of landslides: A review,” Satellite Navigation, Vol.4, Article No.5, 2023. https://doi.org/10.1186/s43020-023-00095-5
- [8] J. Zhang, W. Wen, F. Huang, Y. Wang, X. Chen, and L.-T. Hsu, “GNSS-RTK Adaptively Integrated with LiDAR/IMU Odometry for Continuously Global Positioning in Urban Canyons,” Applied Sciences, Vol.12, No.10, Article No.5193, 2022. https://doi.org/10.3390/app12105193
- [9] M. Rohani, D. Gingras, and D. Gruyer, “A Novel Approach for Improved Vehicular Positioning Using Cooperative Map Matching and Dynamic Base Station DGPS Concept,” IEEE Trans. on Intelligent Transportation Systems, Vol.17, No.1, pp. 230-239, 2016. https://doi.org/10.1109/TITS.2015.2465141
- [10] X. Hu, P. Thevenon, and C. Macabiau, “Cycle Slip Detection and Repair Using an Array of Receivers with Known Geometry for RTK Positioning,” 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), pp. 1123-1134, 2020. https://doi.org/10.1109/PLANS46316.2020.9109871
- [11] S. Kato, M. Kitamura, T. Suzuki, and Y. Amano, “NLOS Satellite Detection Using a Fish-Eye Camera for Improving GNSS Positioning Accuracy in Urban Area,” J. Robot. Mechatron., Vol.28, No.1, pp. 31-39, 2016. https://doi.org/10.20965/jrm.2016.p0031
- [12] T. Suzuki, Y. Takahashi, and Y. Amano, “Precise UAV Position and Attitude Estimation by Multiple GNSS Receivers for 3D Mapping,” Proc. of the 29th Int. Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2016), pp. 1455-1464, 2016. https://doi.org/10.33012/2016.14621
- [13] P. J. G. Teunissen, “The LAMBDA method for the GNSS compass,” Artificial Satellites, Vol.41, No.3, pp. 89-103, 2006. https://doi.org/10.2478/v10018-007-0009-1
- [14] Paul de Jonge and C. C. J. M. Tiberius, “The LAMBDA method for integer ambiguity estimation: implementation aspects,” Delft Geodetic Computing Centre, LGR-Series, No.12, 1996.
- [15] S. Verhagen and P. J. G. Teunissen, “The ratio test for future GNSS ambiguity resolution,” GPS Solut., Vol.17, pp. 535-548, 2013. https://doi.org/10.1007/s10291-012-0299-z
- [16] T. Takasu and A. Yasuda, “Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB,” Int. Symposium on GPS/GNSS, 2009.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.