Paper:
Design of a Quasi-Passive Dynamic Walking Robot Based on Anatomy Trains Theory
Hiroki Nishii*1, Shoei Hattori*2,*3,*4
 , Akira Fukuhara*2
, Hisashi Ishihara*1
, Takeshi Kano*2
, Akio Ishiguro*2
, and Koichi Osuka*1
, Akira Fukuhara*2
, Hisashi Ishihara*1
, Takeshi Kano*2
, Akio Ishiguro*2
, and Koichi Osuka*1
*1Department of Mechanical Engineering, Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan
*2Research Institute of Electrical Communication, Tohoku University
2-1-1 Katahira, Aoba-ku, Sendai, Miyagi 980-8577, Japan
*3Graduate School of Engineering, Tohoku University
6-6 Aoba, Aramaki, Aoba-ku, Sendai, Miyagi 980-8579, Japan
*4Japan Society for the Promotion of Science
5-3-1 Kojimachi, Chiyoda-ku, Tokyo 102-0083, Japan

Dynamic human movements are achieved by appropriate constraints on the degrees of freedom of the complex and flexible human body. The anatomy trains (ATs) theory explains such constraints with whole-body muscular connections called ATs. This paper proposes the design of a quasi-passive dynamic walker with whole-body viscoelastic connections inspired by the ATs theory and investigates the contributions of these long-distance connections to the achievement of gait. We designed a biped robot with a trunk and head, whose passive joints were supported by rubber fiber bands. The robot, named “PEARL III,” is equipped with an antagonistic pair of McKibben pneumatic actuators for each leg at the human hamstring and rectus femoris positions. The most important feature of this robot is that fabric wires mechanically connect its rubber bands and actuators on the back side from the head to the foot, modeled after one of the human ATs, the superficial back lines (SBLs). In an experiment, PEARL III achieved 2D quasi-passive dynamic walking on an inclined plane by contracting and relaxing its actuators using periodic feedforward control. This result suggests that in both the robot and human cases, when a controller contracts the SBL only in the stance phase during passive dynamic walking, the SBL can achieve whole-body posture control and weight support. In addition, the SBL appears to achieve this function depending on their mode of attachment to bones and the presence or absence of antagonistic muscles (or ATs). In the future, by introducing various ATs into robots while recognizing the importance of the appropriate attachment of ATs and the presence of their antagonistic muscles (or ATs), we can expect similar effects in various 3D movements.
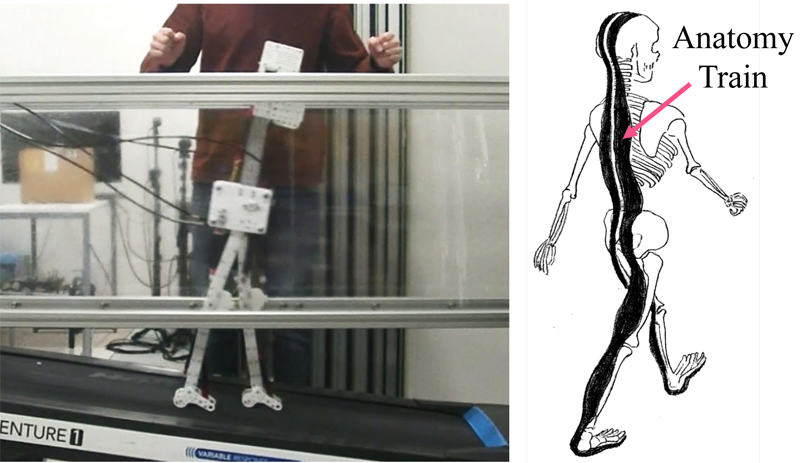
Quasi-passive walker utilizing anatomy train
- [1] N. A. Bernsteĭn, “The Co-ordination and Regulation of Movements,” Pergamon Press, 1967.
- [2] H. Geyer and H. Herr, “A muscle-reflex model that encodes principles of legged mechanics predicts human walking dynamics and muscle activities,” IEEE Trans. on Neural Systems and Rehabilitation Engineering (TNSRE), Vol.18, No.3, pp. 263-273, 2010. https://doi.org/10.1109/TNSRE.2010.2047592
- [3] T. Kano, R. Yoshizawa, and A. Ishiguro, “Tegotae-based decentralised control scheme for autonomous gait transition of snake-like robots,” Bioinspiration & Biomimetics, Vol.12, No.4, Article No.046009, 2017. https://doi.org/10.1088/1748-3190/aa7725
- [4] T. W. Myers, “Anatomy Trains: Myofascial Meridians for Manual and Movement Therapists,” Churchill Livingston, 2001.
- [5] T. McGeer, “Passive dynamic walking,” The Int. J. of Robotics Research, Vol.9, No.2, pp. 62-82, 1990. https://doi.org/10.1177/027836499000900206
- [6] K. Osuka and K. Kirihara, “Motion analysis and experiment of passive walking robot Quartet II,” J. of the Robotics Society of Japan, Vol.18, No.5, pp. 737-742, 2000 (in Japanese). https://doi.org/10.7210/jrsj.18.737
- [7] D. Owaki, M. Koyama, S. Yamaguchi, S. Kubo, and A. Ishiguro, “A 2-D passive-dynamic-running biped with elastic elements,” IEEE Trans. on Robotics (T-RO), Vol.27, No.1, pp. 156-162, 2011. https://doi.org/10.1109/TRO.2010.2098610
- [8] N. Ogihara and N. Yamazaki, “Generation of human bipedal locomotion by a bio-mimetic neuro-musculo-skeletal model,” Biological Cybernetics, Vol.84, No.1, pp. 1-11, 2001. https://doi.org/10.1007/PL00007977
- [9] S. Aoi, T. Ohashi, R. Bamba, S. Fujiki, D. Tamura, T. Funato, K. Senda, Y. Ivanenko, and K. Tsuchiya, “Neuromusculoskeletal model that walks and runs across a speed range with a few motor control parameter changes based on the muscle synergy hypothesis,” Scientific Reports, Vol.9, No.1, pp. 369-381, 2019. https://doi.org/10.1038/s41598-018-37460-3
- [10] T. Umedachi, K. Takeda, T. Nakagaki, R. Kobayashi, and A. Ishiguro, “Fully decentralized control of a soft-bodied robot inspired by true slime mold,” Biological Cybernetics, Vol.102, No.3, pp. 261-269, 2010. https://doi.org/10.1007/s00422-010-0367-9
- [11] S. Shirafuji, S. Ikemoto, and K. Hosoda, “Development of a tendon-driven robotic finger for an anthropomorphic robotic hand,” The Int. J. of Robotics Research, Vol.33, No.5, pp. 677-693, 2014. https://doi.org/10.1177/0278364913518357
- [12] K. Miyashita, Y. Masuda, M. Gunji, A. Fukuhara, K. Tadakuma, and M. Ishikawa, “Emergence of swing-to-stance transition from interlocking mechanism in horse hindlimb,” 2020 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2020. https://doi.org/10.1109/IROS45743.2020.9341026
- [13] A. Badri-Spröwitz, A. A. Sarvestani, M. Sitti, and M. A. Daley, “BirdBot achieves energy-efficient gait with minimal control using avian-inspired leg clutching,” Science Robotics, Vol.7, No.64, Article No.eabg4055, 2022. https://doi.org/10.1126/scirobotics.abg4055
- [14] K. Misu, M. Ikeda, K. Or, M. Ando, M. Gunji, H. Mochiyama, and R. Niiyama, “Robostrich arm: Wire-driven high-DOF underactuated manipulator,” J. Robot. Mechatron., Vol.34, No.2, pp. 328-338, 2022. https://doi.org/10.20965/jrm.2022.p0328
- [15] K. Ito, T. Kinugasa, K. Chiba, Y. Okuda, R. Takasaki, S. Hida, T. Okoshi, R. Hayashi, K. Yoshida, and K. Osuka, “The robotic approach to the passive interlocking mechanism in the hindlimb musculoskeletal system of Crocodylus porosus,” Advanced Robotics, Vol.37, No.18, pp. 1187-1197, 2023. https://doi.org/10.1080/01691864.2023.2256375
- [16] S. Collins, A. Ruina, R. Tedrake, and M. Wisse, “Efficient bipedal robots based on passive-dynamic walkers,” Science, Vol.307, No.5712, pp. 1082-1085, 2005. https://doi.org/10.1126/science.1107799
- [17] Y. Ikemata, A. Sano, and Y. Kato, “Analyses of passive walking that added upper body by means of hip spring-damper mechanism,” Trans. of the Japan Society of Mechanical Engineers, Vol.78, No.796, pp. 3959-3969, 2012 (in Japanese). https://doi.org/10.1299/kikaic.78.3959
- [18] H. Miyamoto, A. Sano, Y. Ikemata, S. Maruyama, and H. Fujimoto, “A study of bouncing rod dynamics aiming at passive running,” Proc. of 2010 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3298-3303, 2010. https://doi.org/10.1109/ROBOT.2010.5509757
- [19] T. Kamimura, K. Sato, D. Murayama, N. Kawase, and A. Sano, “Dynamical effect of elastically supported wobbling mass on biped running,” Proc. of 2021 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4071-4078, 2021. https://doi.org/10.1109/IROS51168.2021.9636036
- [20] M. Kojima, A. Sano, M. Kuwasako, Y. Ikemata, and H. Fujimoto, “A study on motion control of running biped with knee,” Proc. of the 2022 JSME Annual Conf. on Robotics and Mechatronics (ROBOMEC), 2A2-Q06, 2022 (in Japanese). https://doi.org/10.1299/jsmermd.2011._2A2-Q06_1
- [21] M. H. Raibert, “Legged Robots That Balance,” The MIT Press, 1986.
- [22] M. Wisse and J. van Frankenhuyzen, “Design and construction of MIKE; A 2-D autonomous biped based on passive dynamic walking,” Proc. of 2nd Int. Symp. on Adaptive Motion of Animals and Machined (AMAM), pp. 143-154, 2003. https://doi.org/10.1007/4-431-31381-8_13
- [23] T. Takuma and K. Hosoda, “Controlling the walking period of a pneumatic muscle walker,” The Int. J. of Robotics Research, Vol.25, No.9, pp. 861-866, 2006. https://doi.org/10.1177/0278364906069187
- [24] K. Hosoda and K. Narioka, “Synergistic 3D limit cycle walking of an anthropomorphic biped robot,” Proc. of 2007 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 470-475, 2007. https://doi.org/10.1109/IROS.2007.4399612
- [25] H. Takayama, T. Takuma, and K. Hosoda, “Continuous jump of a legged robot equipped with bi-articular muscles,” Proc. of the 2008 JSME Conf. on Robotics and Mechatronics (ROBOMEC), 2P2-I17, 2008 (in Japanese). https://doi.org/10.1299/jsmermd.2008._2P2-I17_1
- [26] T. Takuma, S. Hayashi, and K. Hosoda, “3D biped robot for multi-modal locomotion driven by antagonistic pneumatic actuators,” Proc. of the 4th Int. Symp. on Adaptive Motion of Animals and Machines (AMAM), 2008.
- [27] R. Niiyama, A. Nagakubo, and Y. Kuniyoshi, “Mowgli: A bipedal jumping and landing robot with an artificial musculoskeletal system,” Proc. of 2007 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 2546-2551, 2007. https://doi.org/10.1109/ROBOT.2007.363848
- [28] R. Niiyama, S. Nishikawa, and Y. Kuniyoshi, “Biomechanical Approach to Open-Loop Bipedal Running with a Musculoskeletal Athlete Robot,” Advanced Robotics, Vol.26, Nos.3-4, pp. 383-398, 2012. https://doi.org/10.1163/156855311X614635
- [29] K. Miura and K. Hosoda, “Reaching movements of anthropomorphic robot arm with biarticular muscles,” Proc. of the 2009 JSME annual Conf. on Robotics and Mechatronics (ROBOMEC), 1A2-L08, 2009 (in Japanese). https://doi.org/10.1299/jsmermd.2009._1A2-L08_1
- [30] H. Nishii, S. Hattori, A. Fukuhara, H. Ishihara, T. Kano, A. Ishiguro, and K. Osuka, “A humanoid robot with Anatomy Trains that can passively sustain standing postures,” Proc. of the 11th Int. Symp. on Adaptive Motion of Animals and Machines (AMAM), pp. 71-72, 2023. https://doi.org/10.18910/92272
- [31] D. A. Winter, “Biomechanics and motor control of human movement,” Wiley, 2009. https://doi.org/10.1002/9780470549148
- [32] S. Yoshida, D. Nakanishi, K. Naniwa, Y. Sugimoto, and K. Osuka, “Verification of linear approximation model of McKibben pneumatic actuator,” Trans. of the JSME, Vol.85, No.878, Article No.18-00498, 2019 (in Japanese). https://doi.org/10.1299/transjsme.18-00498
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.