Paper:
An Admittance Controller with a Jerk Limiter for Position-Controlled Robots
Ryusei Mae
 and Ryo Kikuuwe
and Ryo Kikuuwe
Machinery Dynamics Laboratory, Hiroshima University
1-4-1 Kagamiyama, Higashi-hiroshima, Hiroshima 739-8527, Japan

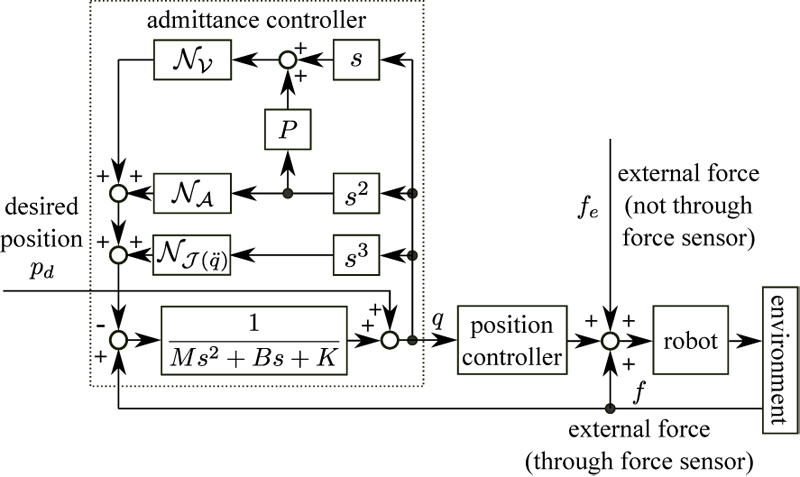
This paper proposes an admittance control scheme for robots equipped with joint-level position controllers involving deadtime. Its main feature is an elaborate discrete-time jerk limiter, which limits the third derivative of the position command sent to the controller. The jerk limiter is designed to suppress undesirable oscillation especially when the robot is in contact with a stiff environment. The controller is designed as a differential inclusion involving normal cones in the continuous-time domain, and its discrete-time algorithm is derived by the implicit Euler discretization. The presented controller was validated with experiments using a collaborative robot UR3e of Universal Robots, which has a deadtime of 6 ms in the velocity-command mode.
A robot controlled with the proposed admittance controller
- [1] D. A. Lawrence, “Impedance control stability properties in common implementations,” Proc. of 1988 IEEE Int. Conf. on Robotics and Automation, Vol.2, pp. 1185-1190, 1988. https://doi.org/10.1109/ROBOT.1988.12222
- [2] C. T. Landi et al., “Variable admittance control preventing undesired oscillating behaviors in physical human-robot interaction,” 2017 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 3611-3616, 2017. https://doi.org/10.1109/IROS.2017.8206207
- [3] Y. Sun et al., “Adaptive admittance control for safety-critical physical human robot collaboration,” IFAC-PapersOnLine, Vol.56, No.2, pp. 1313-1318, 2023. https://doi.org/10.1016/j.ifacol.2023.10.1772
- [4] T. Sun, Z. Wang, C. He, and L. Yang, “Adaptive robust admittance control of robots using duality principle-based impedance selection,” Applied Sciences, Vol.12, No.23, Article No.12222, 2022. https://doi.org/10.3390/app122312222
- [5] C. T. Landi, F. Ferraguti, L. Sabattini, C. Secchi, and C. Fantuzzi, “Admittance control parameter adaptation for physical human-robot interaction,” 2017 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 2911-2916, 2017. https://doi.org/10.1109/ICRA.2017.7989338
- [6] F. Dimeas and N. Aspragathos, “Online stability in human-robot cooperation with admittance control,” IEEE Trans. on Haptics, Vol.9, No.2, pp. 267-278, 2016. https://doi.org/10.1109/TOH.2016.2518670
- [7] B. Yao et al., “Sensorless and adaptive admittance control of industrial robot in physical human-robot interaction,” Robotics and Computer-Integrated Manufacturing, Vol.51, pp. 158-168, 2018. https://doi.org/10.1016/j.rcim.2017.12.004
- [8] G. Kang, H. S. Oh, J. K. Seo, U. Kim, and H. R. Choi, “Variable admittance control of robot manipulators based on human intention,” IEEE/ASME Trans. on Mechatronics, Vol.24, No.3, pp. 1023-1032, 2019. https://doi.org/10.1109/TMECH.2019.2910237
- [9] F. Ferraguti et al., “A variable admittance control strategy for stable physical human–robot interaction,” The Int. J. of Robotics Research, Vol.38, No.6, pp. 747-765, 2019. https://doi.org/10.1177/0278364919840415
- [10] Z. Chen, Q. Guo, T. Li, Y. Yan, and D. Jiang, “Gait prediction and variable admittance control for lower limb exoskeleton with measurement delay and extended-state-observer,” IEEE Trans. on Neural Networks and Learning Systems, Vol.34, No.11, pp. 8693-8706, 2023. https://doi.org/10.1109/TNNLS.2022.3152255
- [11] C. Liu, Y. He, X. Chen, and H. Cao, “Adaptive enhanced admittance force-tracking controller design for highly dynamic interactive tasks,” Industrial Robot, Vol.49, No.5, pp. 903-912, 2022. https://doi.org/10.1108/IR-10-2021-0222
- [12] K. Haninger, M. Radke, A. Vick, and J. Krüger, “Towards high-payload admittance control for manual guidance with environmental contact,” IEEE Robotics and Automation Letters, Vol.7, No.2, pp. 4275-4282, 2022. https://doi.org/10.1109/LRA.2022.3150051
- [13] R. Kikuuwe, “A sliding-mode-like position controller for admittance control with bounded actuator force,” IEEE/ASME Trans. on Mechatronics, Vol.19, No.5, pp. 1489-1500, 2014. https://doi.org/10.1109/TMECH.2013.2286411
- [14] R. Kikuuwe, “Torque-bounded admittance control realized by a set-valued algebraic feedback,” IEEE Trans. on Robotics, Vol.35, No.5, pp. 1136-1149, 2019. https://doi.org/10.1109/TRO.2019.2920069
- [15] M. T. S. Aung and R. Kikuuwe, “Stability enhancement of admittance control with acceleration feedback and friction compensation,” Mechatronics, Vol.45, pp. 110-118, 2017. https://doi.org/10.1016/j.mechatronics.2017.06.011
- [16] Y. Aydin, O. Tokatli, V. Patoglu, and C. Basdogan, “Stable physical human-robot interaction using fractional order admittance control,” IEEE Trans. on Haptics, Vol.11, No.3, pp. 464-475, 2018. https://doi.org/10.1109/TOH.2018.2810871
- [17] Y. Aydin, O. Tokatli, V. Patoglu, and C. Basdogan, “Fractional order admittance control for physical human-robot interaction,” 2017 IEEE World Haptics Conf. (WHC), pp. 257-262, 2017. https://doi.org/10.1109/WHC.2017.7989911
- [18] K. Li, Y. He, K. Li, and C. Liu, “Adaptive fractional-order admittance control for force tracking in highly dynamic unknown environments,” Industrial Robot, Vol.50, No.3, pp. 530-541, 2023. https://doi.org/10.1108/IR-09-2022-0244
- [19] A. Morbi and M. Ahmadi, “Safely rendering small impedances in admittance-controlled haptic devices,” IEEE/ASME Trans. on Mechatronics, Vol.21, No.3, pp. 1272-1280, 2016. https://doi.org/10.1109/TMECH.2015.2506994
- [20] A. Lecours and C. Gosselin, “Computed-torque control of a four-degree-of-freedom admittance controlled intelligent assist device,” J. P. Desai, G. Dudek, O. Khatib, and V. Kumar (Eds.), “Experimental Robotics: The 13th International Symposium on Experimental Robotics,” pp. 635-649, Springer, 2013. https://doi.org/10.1007/978-3-319-00065-7_43
- [21] R. Kikuuwe and B. Brogliato, “A new representation of systems with frictional unilateral constraints and its Baumgarte-like relaxation,” Multibody System Dynamics, Vol.39, No.3, pp. 267-290, 2017. https://doi.org/10.1007/s11044-015-9491-6
- [22] B. Brogliato, A. Daniilidis, C. Lemaréchal, and V. Acary, “On the equivalence between complementarity systems, projected systems and differential inclusions,” Systems & Control Letters, Vol.55, No.1, pp. 45-51, 2006. https://doi.org/10.1016/j.sysconle.2005.04.015
- [23] V. Acary and B. Brogliato, “Numerical Methods for Nonsmooth Dynamical Systems: Applications in Mechanics and Electronics,” Springer, 2008. https://doi.org/10.1007/978-3-540-75392-6
- [24] H. H. Bauschke and P. L. Combettes, “Convex Analysis and Monotone Operator Theory in Hilbert Spaces,” 2nd edition, Springer, 2017. https://doi.org/10.1007/978-3-319-48311-5
- [25] H. K. Khalil, “Nonlinear Systems,” 3rd edition, Prentice Hall, 2002.
- [26] J.-J. E. Slotine and W. Li, “Applied Nonlinear Control,” Prentice Hall, 1990.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.