Paper:
Development of Formation Control System for Multiple AUVs with Sonar Interference Avoidance Function
Akihiro Okamoto
 , Masahiko Sasano
, Kangsoo Kim
, and Toshifumi Fujiwara
, Masahiko Sasano
, Kangsoo Kim
, and Toshifumi Fujiwara
Offshore Advanced Technology Department, National Maritime Research Institute, National Institute of Maritime, Port and Aviation Technology
6-38-1 Shinkawa, Mitaka, Tokyo 181-0004, Japan

Although research has been conducted on the simultaneous operation of multiple autonomous underwater vehicles (AUVs) to improve the efficiency of oceanographic surveys, it has become clear that sonar interference occurs between AUVs that are in close proximity. In this study, a formation control system was developed for actual operation at sea, based on the assumption of an operational system with an autonomous surface vehicle (ASV) and multiple AUVs. A control algorithm was implemented to maintain the AUVs within the desired range of the ASV, ensure communication, and avoid sonar interference by sending commands to increase or decrease the speed of the AUVs. Simulations were performed to verify the effectiveness of the developed method for the operation of one ASV and 10 AUVs. Evaluation scores for the distance between vehicles were introduced to quantify the effectiveness of the algorithm. The proposed method obtained the highest scores for formation control in the assumed operational scenarios. This confirms the effectiveness of the proposed method in avoiding the side-by-side relationships that cause sonar interference.
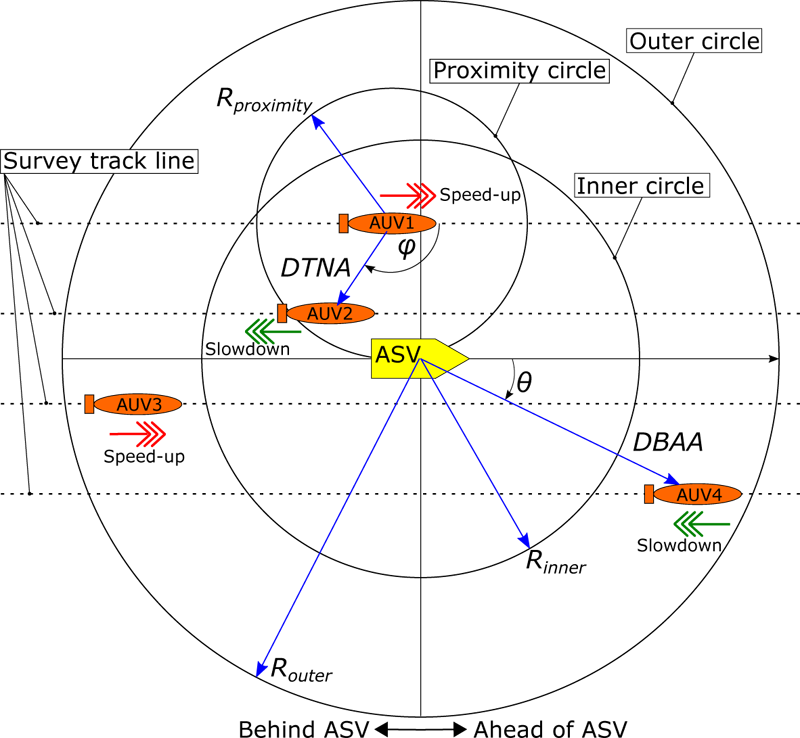
Method of preventing side-by-side relationships for AUVs
- [1] T. Ura, “Development Timeline of the Autonomous Underwater Vehicle in Japan,” J. Robot. Mechatron., Vol.32, No.4, pp. 713-721, 2020. https://doi.org/10.20965/jrm.2020.p0713
- [2] H. Yamagata, S. Kochii, H. Yoshida, Y. Nogi, and T. Maki, “Development of AUV MONACA – Hover-Capable Platform for Detailed Observation Under Ice –,” J. Robot. Mechatron., Vol.33, No.6, pp. 1223-1233, 2021. https://doi.org/10.20965/jrm.2021.p1223
- [3] A. Okamoto, T. Seta, M. Sasano, S. Inoue, and T. Ura, “Visual and Autonomous Survey of Hydrothermal Vents Using a Hovering-Type AUV: Launching Hobalin Into the Western Offshore of Kumejima Island,” Geochemistry, Geophysics, Geosystems, Vol.20, No.12, pp. 6234-6243, 2019. https://doi.org/10.1029/2019GC008406
- [4] M. Sasano, A. Okamoto, S. Inaba, T. Fujiwara, H. Yamamoto, E. Asakawa, and S. Takashima, “Applications for Autonomous Control of Multiple AUVs Toward Deep-sea Resource Explorations,” OCEANS 2022 MTS/IEEE Hampton Roads, 2022. https://doi.org/10.1109/OCEANS47191.2022.9977237
- [5] T. Yan, Z. Xu, S. X. Yang, and S. A. Gadsden, “Formation Control of Multiple Autonomous Underwater Vehicles: A Review,” Intelligence & Robotics, Vol.3, No.1, 2023. https://doi.org/10.20517/ir.2023.01
- [6] T. Fujiwara, K. Kim, M. Sasano, T. Sato, S. Inaba, A. Okamoto, M. Imasato, and H. Osawa, “Sea Trials Summarization on Fundamental Formation Control of Multiple Cruising AUVs,” Proc. ASME 2021 40th Int. Conf. on Ocean, Offshore and Arctic Engineering, Vol.5: Ocean Space Utilization, Article No.OMAE2021-61483, 2021. https://doi.org/10.1115/OMAE2021-61483
- [7] T. Fujiwara, K. Kim, M. Sasano, T. Sato, S. Inaba, A. Okamoto, M. Imasato, and H. Osawa, “Sea Trials Summarization on Fundamental Formation Control of Multiple Cruising AUVs—2nd Report: 3 Cruising AUVs With 1 ASV Trial, and Hovering AUVs’ AUV-AUV Positioning and Communication—,” Proc. ASME 2022 41st Int. Conf. on Ocean, Offshore and Arctic Engineering, Vol.4: Ocean Space Utilization, Article No.OMAE2022-78370, 2022. https://doi.org/10.1115/OMAE2022-78370
- [8] A. Okamoto, K. Kim, M. Sasano, T. Sato, S. Inaba, S. Kondo, H. Matsumoto, T. Murashima, T. Shimura, T. Fujiwara, and H. Osawa, “Development of a Basic Formation Control System for Heterogeneous Autonomous Marine Vehicles and Its Sea Trials in Suruga Bay,” Proc. of 2023 IEEE Underwater Technology (UT), 2023. https://doi.org/10.1109/UT49729.2023.10103439
- [9] H. Xu and C. Jiang, “Heterogeneous Oceanographic Exploration System Based on USV and AUV: A Survey of Developments and Challenges,” J. of University of Chinese Academy of Sciences, Vol.38, No.2, pp. 145-159, 2021. https://doi.org/10.7523/j.issn.2095-6134.2021.02.001
- [10] B. Christ and J. Klara, “A New Approach to Wide Area Survey Multiple AUV Application,” OCEANS 2016 MTS/IEEE Monterey, 2016. https://doi.org/10.1109/OCEANS.2016.7761449
- [11] T. F. Fyrvik, J. B. Bremnes, and A. S. Sørensen, “Hybrid Tracking Controller for an ASV Providing Mission Support for an AUV,” IFAC-PapersOnLine, Vol.55, Issue 31, pp. 91-97, 2022. https://doi.org/10.1016/j.ifacol.2022.10.414
- [12] T. Hyakudome, H. Matsumoto, Y. Nakano, Y. Watanabe, T. Fukuda, R. Suga, K. Meguro, H. Yoshida, T. Kasaya, and H. Iwamoto, “Development of ASV for Using Multiple AUVs Operation,” OCEANS 2018 MTS/IEEE Charleston, 2018. https://doi.org/10.1109/OCEANS.2018.8604850
- [13] H. Matsumoto, T. Hyakudome, Y. Nakano, Y. Watanabe, T. Fukuda, R. Suga, K. Meguro, and H. Yoshida, “Operational Test of Multiple AUVs With an ASV,” 2018 OCEANS – MTS/IEEE Kobe Techno-Oceans (OTO), pp. 1-4, 2018. https://doi.org/10.1109/OCEANSKOBE.2018.8559250
- [14] T. Sato, K. Kim, M. Sasano, A. Okamoto, S. Inaba, S. Kondo, H. Matsumoto, T. Murashima, T. Fujiwara, and H. Osawa, “Sea Trials of Multiple Heterogenous Cruising Auvs and Asv With Basic Formation Control,” Proc. 2023 42nd Int. Conf. on Ocean, Offshore and Arctic Engineering, Vol.5: Ocean Engineering, Article No.OMAE2023-103370, 2023. https://doi.org/10.1115/OMAE2023-103370
- [15] A. Okamoto, M. Imasato, S. Hirao, H. Sekiguchi, T. Seta, M. Sasano, and T. Fujiwara, “Development of Testbed AUV for Formation Control and Its Fundamental Experiment in Actual Sea Model Basin,” J. Robot. Mechatron., Vol.33, No.1, pp. 151-157, 2021. https://doi.org/10.20965/jrm.2021.p0151
- [16] A. Okamoto, M. Sasano, K. Kim, and T. Fujiwara, “Position Error Correction Method Using Circle Hough Transform for AUV Navigation,” Trans. of Navigation, Vol.8, Issue 1, pp. 11-20, 2023. https://doi.org/10.18949/jintransnavi.8.1_11
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.