Development Report:
Development of Zeolite Removal Robot for Decommissioning
Daisaku Uchijima, Kenichi Tao, Koju Nishizawa, Shiro Kikuchi, Tomoki Sakaue, and Hajime Hanaoka
Tokyo Electric Power Company Holdings, Inc.
1-1-3 Uchisaiwaicho, Chiyoda-ku, Tokyo 100-8560, Japan

The transfer of stagnant water from the basement floor of the waste treatment building at the Fukushima Daiichi Nuclear Power Station is planned because of the possibility of water flowing out of the building if another tsunami occurs. However, the basement floor is installed with high-dose zeolite sandbags as adsorbents for radioactive materials, which renders their removal challenging. In this study, we conduct a field survey and field reproduction as well as develop a robot that can perform zeolite removal based on the results obtained. In addition, we perform verification tests in a full-scale mock-up test environment and extract issues for application to actual equipment.
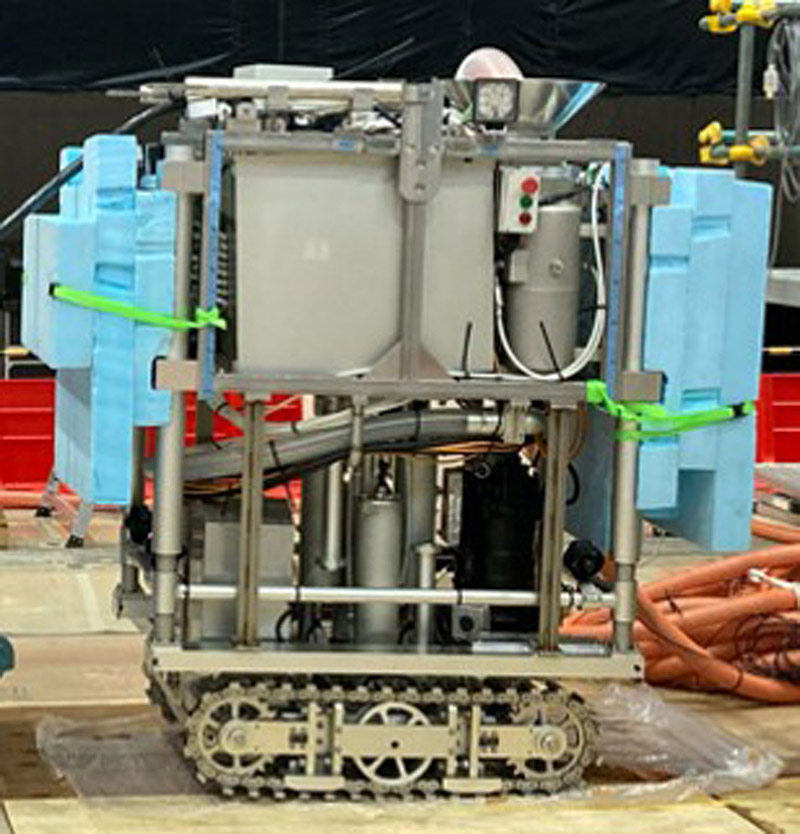
Zeolite-removal robot
- [1] S. Kawamura, T. Kimura, S. Ohmori, Y. Umeda, K. Hashimoto, K. Hirao, and S. Sasa, “Development of an organic iodine filter design and performance improvement of filtered containment venting system,” Proc. of the 21st National Symposium on Power and Energy Systems (SPES 2016), Article No.506, 2016.
- [2] Radioactivity Testing and Investigation Committee for Insulating Materials, “Radiation Deterioration of Insulating Materials and Current Status of Radiation Resistance Test Methods,” IEEJ Technical Report, Article No.2-086, 1979 (in Japanese).
- [3] M. Nancekievill, A. R. Jones, M. J. Joyce, B. Lennox, S. Watson, J. Katakura, K. Okumura, S. Kamada, M. Katoh, and K. Nishimura, “Development of a Radiological Characterization Submersible ROV for Use at Fukushima Daiichi,” IEEE Trans. on Nuclear Science, Vol.65, Issue 9, pp. 2565-2572, 2018. https://doi.org/10.1109/TNS.2018.2858563
- [4] S. Okada, K. Hirano, R. Kobayashi, and Y. Kometani, “Development and Application of Robotics for Decommissioning of Fukushima Daiichi Nuclear Power Plant,” Hitachi Review, Vol.69, No.4, pp. 148-155, 2020.
- [5] T. Sakaue, T. Nagakita, T. Kaneda, Y. Yamashita, K. Nishizawa, K. Kanbara, H. Hanaoka, S. Shirai, S. Kikuchi, and D. Uchijima, “Development of USV Used in Underground Floors Surveying of the Contaminated Buildings at Fukushima Daiichi NPS,” Proc. of the 2022 IEEE Int. Symp. on Safety, Security, and Rescue Robotics (SSRR), pp. 224-229, 2022. https://doi.org/10.1109/SSRR56537.2022.10018645
- [6] G. Lan and S. Ma, “Quasi-Static Analysis of a Novel Crawler-Driven Robot Motion,” J. Robot. Mechatron., Vol.18, No.5, pp. 556-563, 2006. https://doi.org/10.20965/jrm.2006.p0556
- [7] J. Hirasawa, “Improvement of the Mobility on the Step-Field for a Stair Climbable Robot with Passive Crawlers,” J. Robot. Mechatron., Vol.32, No.4, pp. 780-788, 2020. https://doi.org/10.20965/jrm.2020.p0780
- [8] Y. Ohtsubo and M. Matsuyama, “Group Control of Mobile Robots for More Efficient Searches – Verification of Semi-Autonomous Trajectory Tracking Motions in Irregular Ground Environment –,” J. Robot. Mechatron., Vol.30, No.6, pp. 980-990, 2018. http://doi.org/10.20965/jrm.2018.p0980
- [9] Y. Orita, K. Takaba, and T. Fukao, “Human Tracking of a Crawler Robot in Climbing Stairs,” J. Robot. Mechatron., Vol.33, No.6, pp. 1338-1348, 2021. https://doi.org/10.20965/jrm.2021.p1338
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.