Development Report:
Development of Human-Size Swallowing Robot
Hisaki Sato*, Hiroshi Kobayashi*, Kenta Matsumoto*
 , Takuya Hashimoto*
, and Yukihiro Michiwaki**
, Takuya Hashimoto*
, and Yukihiro Michiwaki**
*Department of Mechanical Engineering, Tokyo University of Science
6-3-1 Niijuku, Katsushika-ku, Tokyo 125-8585, Japan
**Department of Oral and Maxillofacial Surgery, School of Medicine, Toho University
5-21-16 Omorinishi, Ota-ku, Tokyo 143-0015, Japan

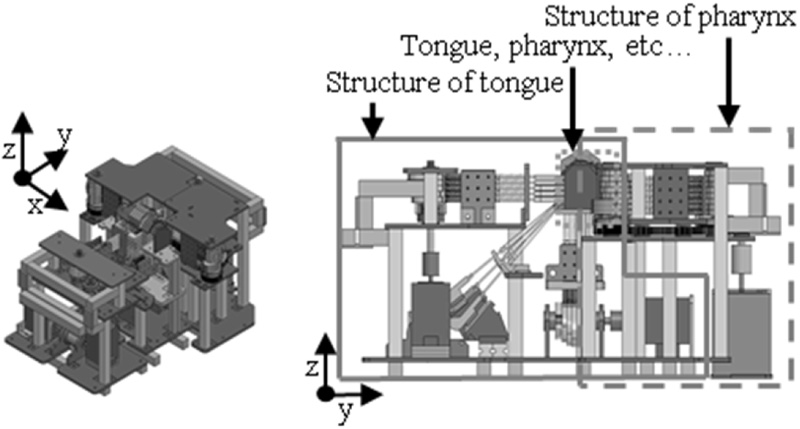
The number of patients with swallowing disorders is increasing according to the aging of society, although swallowing plays a significant role in the dietary process. The process of swallowing includes a very fast reflexive motion; there are difficulties in analyzing its mechanism even with the latest medical imaging technologies. In recent years, a simulator, named “Swallow Vision®,” has been developed from medical images such as MRI and CT to clearly visualize swallowing motion. It enables us to understand the kinesiology and analyze the motion of organs in swallowing. By using kinematic data obtained from this simulator and referring to medical knowledge, we develop a robotic simulator that has the potential to mimic human swallowing motion. The robot is able to perform tongue depressor and pharynx contraction to swallow food bolus. A performance evaluation is conducted to determine whether it is possible to swallow food bolus properly or where the bolus remains when failing.
Developing robot to mimic human swallow
- [1] Y. Yamada, “Swallowing,” Physical Therapy Japan, Vol.25, No.4, pp. 235-239, 1998 (in Japanese). https://doi.org/10.15063/rigaku.KJ00003223477
- [2] S. Teramoto et al., “High incidence of aspiration pneumonia in community- and hospital-acquired pneumonia in hospitalized patients: A multicenter, prospective study in Japan,” J. of the American Geriatrics Society, Vol.56, No.3, pp. 577-579, 2008. https://doi.org/10.1111/j.1532-5415.2008.01597.x
- [3] Y. Michiwaki, M. Yokoyama, Y. Kinumatsu, K. Mori, and K. Michi, “Cine MRI to demonstrate normal swallow,” J. of the Japanese Stomatological Society, Vol.51, No.4, pp. 237-243, 2002 (in Japanese). https://doi.org/10.11277/stomatology1952.51.237
- [4] Y. Inamoto and E. Saitoh, “Morphologic and kinematic analysis of swallowing using 3D dynamic CT,” Stomato-pharyngology, Vol.31, No.1, pp. 15-19, 2018 (in Japanese). https://doi.org/10.14821/stomatopharyngology.31.15
- [5] R. W. Bastian, “The videoendoscopic swallowing study: An alternative and partner to the videofluoroscopic swallowing study,” Dysphagia, Vol.8, No.4, pp. 359-367, 1993. https://doi.org/10.1007/BF01321780
- [6] J. Zhu and H. Mizunuma, “Flow simulation of grated yam and X-ray videofluorgroaphy measurement,” The Proc. of the 2013 Mechanical Engineering Congress Japan, Article No.S051041, 2013 (in Japanese). https://doi.org/10.1299/jsmemecj.2013._S051041-1
- [7] H. Mizunuma et al., “Numerical modeling and simulation on the swallowing of jelly,” J. of Texture Studies, Vol.40, No.4, pp. 406-426, 2009. https://doi.org/10.1111/j.1745-4603.2009.00189.x
- [8] Y. Meng, M. A. Rao, and A. K. Datta, “Computer simulation of the pharyngeal bolus transport of Newtonian and non-Newtonian fluids,” Food and Bioproducts Processing, Vol.83, No.4, pp. 297-305, 2005. https://doi.org/10.1205/fbp.04209
- [9] T. Hashimoto et al., “Development of a musculoskeletal model of hyolaryngeal elements for understanding pharyngeal swallowing mechanics,” Applied Sciences, Vol.10, No.18, Article No.6276, 2020. https://doi.org/10.3390/app10186276
- [10] T. Kikuchi, Y. Michiwaki, and H. Azegami, “Identification of muscle activities involved in hyoid bone movement during swallowing using computer simulation,” Computer Methods in Biomechanics and Biomedical Engineering: Imaging & Visualization, Vol.11, No.5, pp. 1791-1802, 2023. https://doi.org/10.1080/21681163.2023.2189486
- [11] H. Li et al., “A bioinspired soft swallowing robot based on compliant guiding structure,” Soft Robotics, Vol.7, No.4, pp. 491-499, 2020. https://doi.org/10.1089/soro.2018.0154
- [12] F.-J. Chen, S. Dirven, W. Xu, X.-N. Li, and J. Bronlund, “Design and fabrication of a soft actuator for a swallowing robot,” J.-H. Kim, E. T. Matson, H. Myung, P. Xu, and F. Karray (Eds.), “Robot Intelligence Technology and Applications 2: Results from the 2nd International Conference on Robot Intelligence Technology and Applications,” pp. 483-493, Springer, 2014. https://doi.org/10.1007/978-3-319-05582-4_42
- [13] Y. Noh et al., “Development of a robot which can simulate swallowing of food boluses with various properties for the study of rehabilitation of swallowing disorders,” 2011 IEEE Int. Conf. on Robotics and Automation, pp. 4676-4681, 2011. https://doi.org/10.1109/ICRA.2011.5980134
- [14] Y. Fujiso et al., “Swall-E: A robotic in-vitro simulation of human swallowing,” PLOS ONE, Vol.13, No.12, Article No.e0208193, 2018. https://doi.org/10.1371/journal.pone.0208193
- [15] T. Kikuchi et al., “Development and validation of swallowing simulator Swallow Vision,” 32th Symp. on Computational Fluid Dynamics, Session No.F03-2, 2018.
- [16] M. Schünke, E. Schulte, U. Schumacher, M. Voll, and K. Wesker (translated by T. Sakai and O. Otani), “Prometheus LernAtlas der Anatomie: Hals und innere Organe,” Igaku-Shoin Ltd., 2008 (in Japanese).
- [17] Y. Yamada, “The Understanding of Eating and Swallowing Functions,” pp. 88-91, Ishiyaku Publishers, 2003 (in Japanese).
- [18] H. Tohara, K. Abe, E. Nakayama, and K. Ueda, “Treating patients with dysphagia: Evaluation and training for dysphagia,” Annals of Japan Prosthodontic Society, Vol.5, No.3, pp. 265-271, 2013 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.