Development Report:
Development and Evaluation of Arm Lifting Assist Devices
Ryota Jitsukawa, Hiroshi Kobayashi, Kenta Matsumoto
 , and Takuya Hashimoto
, and Takuya Hashimoto
Department of Mechanical Engineering, Tokyo University of Science
6-3-1 Niijuku, Katsushika-ku, Tokyo 125-8585, Japan

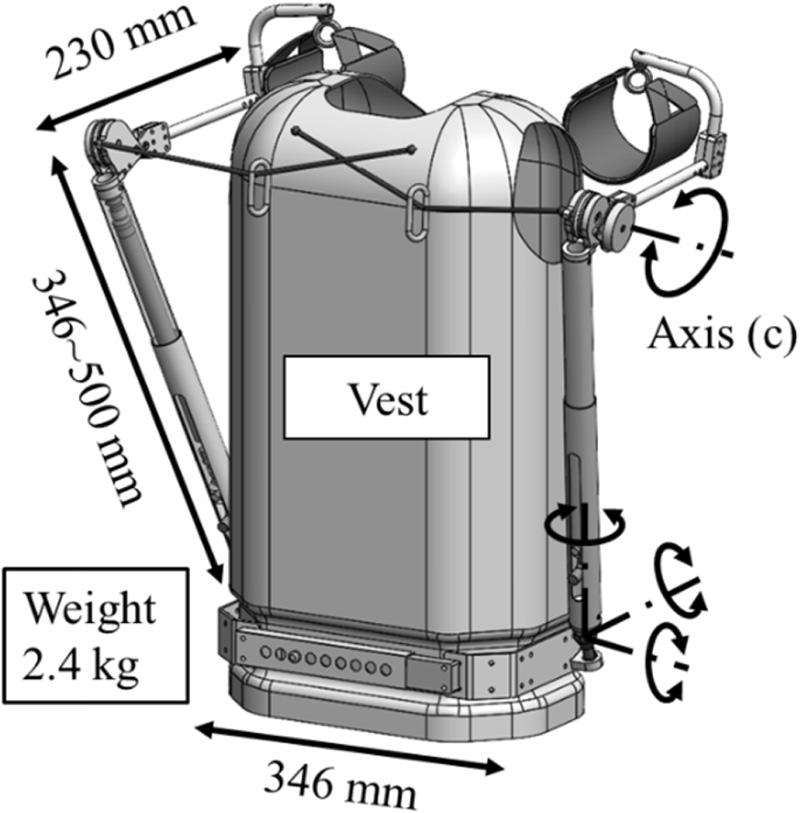
Musculoskeletal disorders are common occupational diseases that have become a major social problem. Mechanization has been promoted as a solution to this problem. However, several tasks still require manual labor, such as fruit harvesting in orchards, making the introduction of machinery difficult in many cases. Recently, from the viewpoint of worker protection and ergonomics, various wearable robots for work support have attracted attention. In Europe and the US, there has been much development of arm-lifting assistive devices that support upward work while holding tools in the hands for industrial applications. However, most of the devices currently on the market are expensive compared to their assistive capabilities. Against this background, we developed three types of arm-lifting assistive devices with different concepts (an exoskeleton arm-lifting assistive device utilizing a gas spring, an exoskeleton arm-lifting assistive device utilizing McKibben-type artificial muscles, and an arm-lifting assistive suit utilizing rubber) to develop inexpensive, high-power devices. Furthermore, comparative verification of the assist effectiveness of each device was conducted.
Artificial muscle model
- [1] J. R. Grieve and C. R. Dickerson, “Overhead work: Identification of evidence-based exposure guidelines,” Occup. Ergon., Vol.8, No.1, pp. 53-66, 2008. https://doi.org/10.3233/OER-2008-8105
- [2] S. Spada, L. Ghibaudo, S. Gilotta, L. Gastaldi, and M. P. Cavatorta, “Analysis of exoskeleton introduction in industrial reality: Main issues and EAWS risk assessment,” Proc. of the AHFE 2017 Int. Conf. on Physical Ergonomics and Human Factors, pp. 236-244, 2018. https://doi.org/10.1007/978-3-319-60825-9_26
- [3] J. C. Gillette and M. L. Stephenson, “Electromyographic assessment of a shoulder support exoskeleton during on-site job tasks,” IISE Trans. Occup. Ergon. Hum. Factors, Vol.7, Nos.3-4, pp. 302-310, 2019. https://doi.org/10.1080/24725838.2019.1665596
- [4] S. Kim et al., “Assessing the influence of a passive, upper extremity exoskeletal vest for tasks requiring arm elevation: Part I – ‘Expected’ effects on discomfort, shoulder muscle activity, and work task performance,” Appl. Ergon., Vol.70, pp. 315-322, 2018. https://doi.org/10.1016/j.apergo.2018.02.025
- [5] P. Maurice et al., “Objective and subjective effects of a passive exoskeleton on overhead work,” IEEE Trans. Neural Syst. Rehabil. Eng., Vol.28, No.1, pp. 152-164, 2020. https://doi.org/10.1109/TNSRE.2019.2945368
- [6] I. Pacifico et al., “An experimental evaluation of the proto-MATE: A novel ergonomic upper-limb exoskeleton to reduce workers’ physical strain,” IEEE Robot. Autom. Mag., Vol.27, No.1, pp. 54-65, 2020. https://doi.org/10.1109/MRA.2019.2954105
- [7] I. Pacifico et al., “Evaluation of a spring-loaded upper-limb exoskeleton in cleaning activities,” Appl. Ergon., Vol.106, Article No.103877, 2023. https://doi.org/10.1016/j.apergo.2022.103877
- [8] Y.-K. Kong et al., “Efficacy of passive upper-limb exoskeletons in reducing musculoskeletal load associated with overhead tasks,” Appl. Ergon., Vol.109, Article No.103965, 2023. https://doi.org/10.1016/j.apergo.2023.103965
- [9] B. M. Otten, R. Weidner, and A. Argubi-Wollesen, “Evaluation of a novel active exoskeleton for tasks at or above head level,” IEEE Robot. Autom. Lett., Vol.3, No.3, pp. 2408-2415, 2018. https://doi.org/10.1109/LRA.2018.2812905
- [10] L. Van Engelhoven et al., “Evaluation of an adjustable support shoulder exoskeleton on static and dynamic overhead tasks,” Proc. of the Human Factors and Ergonomics Society Annual Meeting, Vol.62, No.1, pp. 804-808, 2018. https://doi.org/10.1177/1541931218621184
- [11] Y. Yamada et al., “TasKi: Overhead work assistance device with passive gravity compensation mechanism,” J. Robot. Mechatron., Vol.32, No.1, pp. 138-148, 2020. https://doi.org/10.20965/jrm.2020.p0138
- [12] M. Cifrek, V. Medved, S. Tonković, and S. Ostojić, “Surface EMG based muscle fatigue evaluation in biomechanics,” Clin. Biomech., Vol.24, No.4, pp. 327-340, 2009. https://doi.org/10.1016/j.clinbiomech.2009.01.010
- [13] M. Ide, T. Hashimoto, K. Matsumoto, and H. Kobayashi, “Evaluation of the power assist effect of muscle suit for lower back support,” IEEE Access, Vol.9, pp. 3249-3260, 2021. https://doi.org/10.1109/ACCESS.2020.3047637
- [14] T. Kizuka, T. Masuda, T. Kiryu, and T. Sadoyama, “Biomechanism Library: Practical Usage of Surface Electromyogram,” Tokyo Denki University Press, 2006 (in Japanese).
- [15] N. Ichihashi, “Kinesiology: Joint Control Mechanism and Muscle Function,” pp. 89-93, Medical View Co., Ltd., 2017 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.