Paper:
High-Resolution Point Cloud Registration Method for Three-Dimensional Piping Measurements
Jin Akiyama*, Yuan Zong*, Naoki Shinada*, Taro Suzuki**
 , and Yoshiharu Amano*
, and Yoshiharu Amano*
*Waseda University
17 Kikui-cho, Shinjuku-ku, Tokyo 162-0044, Japan
**Chiba Institute of Technology
2-17-1 Tsudanuma, Narashino, Chiba 275-0016, Japan

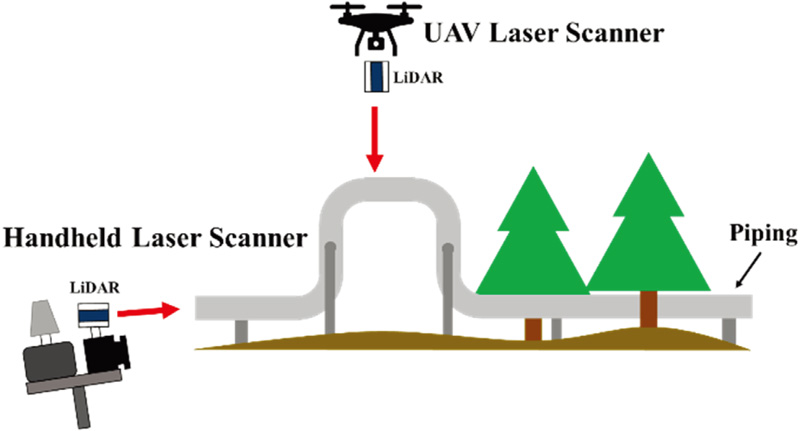
In this study, we propose a method for generating highly accurate high-density point clouds of piping facilities using an unmanned aerial vehicle (UAV) laser scanner and a handheld laser scanner. The point cloud for each scanline measured by the UAV scanner is repositioned on the piping axis, and the handheld scanner’s 3D point cloud is subsequently registered so that the center axis of the piping coincides with the UAV point cloud as a reference. The method proposed in this study was used to accurately reconstruct linear piping measured in high winds, which can easily deteriorate measurement accuracy. Whereas the conventional method incurred a deviation of 44.3 mm between the predicted and true values at altitudes of 15 m, the proposed method reduced this deviation to 19.4 mm. An application of the registration method demonstrated that the combined use of the two laser scanners enabled the creation of a high-density point cloud.
Registration method of two measurement devices
- [1] Y. Zong, N. Shinada, T. Suzuki, and Y. Amano, “Anomaly detection in pipeline using 3D map generated by UAV,” The Proc. of 2021 JSME Annual Conf. on Robotics and Mechatronics, Session ID 2P1-A18, 2021 (in Japanese). https://doi.org/10.1299/jsmermd.2021.2P1-A18
- [2] T.-C. Hou, J.-W. Liu, and Y.-W. Liu, “Algorithmic clustering of LiDAR point cloud data for textural damage identifications of structural elements,” Measurement, Vol.108, pp. 77-90, 2017. https://doi.org/10.1016/j.measurement.2017.05.032
- [3] M. J. Olsen et al., “Damage assessment of the 2010 Chile earthquake and tsunami using terrestrial laser scanning,” Earthquake Spectra, Vol.28, No.1_suppl1, pp. 179-197, 2012. https://doi.org/10.1193/1.4000021
- [4] A. Jaakkola et al., “A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements,” ISPRS J. of Photogrammetry and Remote Sensing, Vol.65, No.6, pp. 514-522, 2010. https://doi.org/10.1016/j.isprsjprs.2010.08.002
- [5] R. Li, J. Liu, L. Zhang, and Y. Hang, “LIDAR/MEMS IMU integrated navigation (SLAM) method for a small UAV in indoor environments,” 2014 DGON Inertial Sensors and Systems (ISS), 2014. https://doi.org/10.1109/InertialSensors.2014.7049479
- [6] T. Suzuki, D. Inoue, and Y. Amano, “Robust UAV position and attitude estimation using multiple GNSS receivers for laser-based 3D mapping,” 2019 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4402-4408, 2019. https://doi.org/10.1109/IROS40897.2019.8967894
- [7] M. Miwa and T. Ushiroda, “Precision flight drones with RTK-GNSS,” J. Robot. Mechatron., Vol.33, No.2, pp. 371-378, 2021. https://doi.org/10.20965/jrm.2021.p0371
- [8] T. Suzuki, “3D mapping using lidar and unmanned aerial vehicle,” J. of the Society of Instrument and Control Engineers, Vol.60, No.10, pp. 711-715, 2021 (in Japanese). https://doi.org/10.11499/sicejl.60.711
- [9] C. H. P. Nguyen and Y. Choi, “Comparison of point cloud data and 3D CAD data for on-site dimensional inspection of industrial plant piping systems,” Automation in Construction, Vol.91, pp. 44-52, 2018. https://doi.org/10.1016/j.autcon.2018.03.008
- [10] T. Rabbani and F. van den Heuvel, “3D industrial reconstruction by fitting CSG models to a combination of images and point clouds,” ISPRS Archives, Vol.35, Part B5, pp. 7-12, 2004.
- [11] K. Kawashima, S. Kanai, and H. Date, “Automatic recognition and modeling of piping system from large-scale terrestrial laser scanned point cloud,” 2012 Asian Conf. on Design and Digital Engineering, 2012.
- [12] K. Kawashima, S. Kanai, and H. Date, “As-built modeling of piping system from terrestrial laser-scanned point clouds using normal-based region growing,” J. of Computational Design and Engineering, Vol.1, No.1, pp. 13-26, 2014. https://doi.org/10.7315/JCDE.2014.002
- [13] S. Rusinkiewicz and M. Levoy, “Efficient variants of the ICP algorithm,” Proc. of 3rd Int. Conf. on 3-D Digital Imaging and Modeling, pp. 145-152, 2001. https://doi.org/10.1109/IM.2001.924423
- [14] T. Suzuki, S. Shiozawa, A. Yamaba, and Y. Amano, “Forest data collection by UAV lidar-based 3D mapping: Segmentation of individual tree information from 3D point clouds,” Int. J. Automation Technol., Vol.15, No.3, pp. 313-323, 2021. https://doi.org/10.20965/ijat.2021.p0313
- [15] T. Suzuki, D. Inoue, and Y. Amano, “Robust UAV position and attitude estimation using multiple GNSS receivers for laser-based 3D mapping,” 2019 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4402-4408, 2019. https://doi.org/10.1109/IROS40897.2019.8967894
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.