Paper:
An Inchworm Robot with Self-Healing Ability Using SMA Actuators
Haruya Fukuchi and Hideyuki Sawada

Waseda University
3-4-1 Okubo, Shinjuku-ku, Tokyo 169-8555, Japan

In this paper, we propose an inchworm-type soft robot using a self-healing gel as its body and shape-memory alloy (SMA) wires as its actuators. To realize inchworm-like locomotion, two coiled SMA wires are placed in parallel in the gel-fabricated body. The bottom-side wire and the upper-side wire reciprocally bend by applying electric current to the actuators. To realize the self-restoration automatically, the robot consists of a self-healing body equipped with magnets. The paper introduces the structure of the inchworm-shaped robot with its inchworm-like locomotion performance, together with the self-healing function.
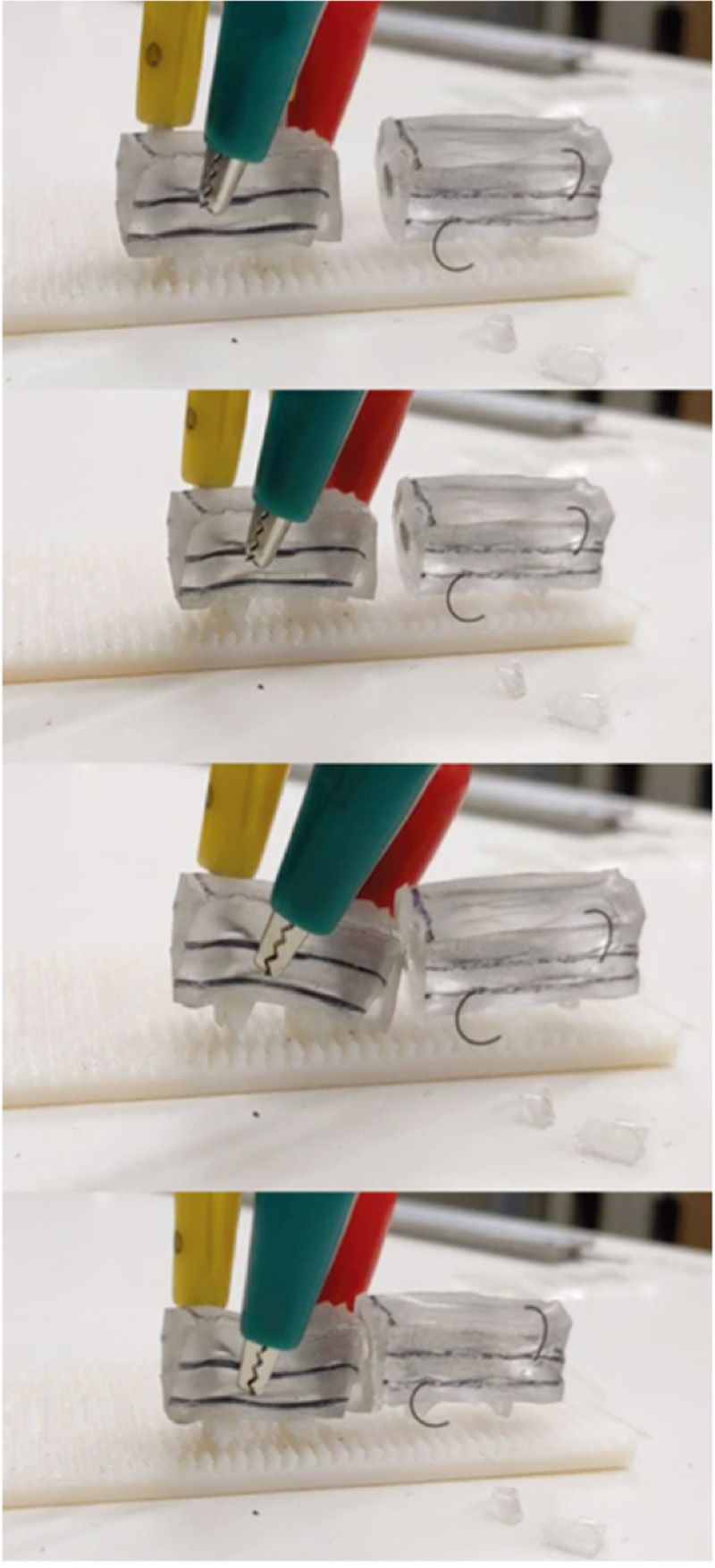
An self-healing inchworm-shaped robot being combined
- [1] K. Takashima, D. Iwamoto, S. Oshiro, T. Noritsugu, and T. Mukai, “Characteristics of Pneumatic Artificial Rubber Muscle Using Two Shape-Memory Polymer Sheets,” J. Robot. Mechatron., Vol.33, No.3, pp. 653-664, 2021. https://doi.org/10.20965/jrm.2021.p0653
- [2] T. Umedachi and M. Shimizu, “Toward Self-Modifying Bio-Soft Robots,” J. Robot. Mechatron., Vol.34, No.2, pp. 219-222, 2022. https://doi.org/10.20965/jrm.2022.p0219
- [3] L. Yang et al., “Soft Tunable Gelatin Robot with Insect-like Claw for Grasping, Transportation, and Delivery,” ACS Appl. Polym. Mater., Vol.4, No.8, pp. 5431-5440, 2022. https://doi.org/10.1021/acsapm.2c00522
- [4] C. Lee et al., “Soft robot review,” Int. J. Control Autom. Syst., Vol.15, No.1, pp. 3-15, 2017. https://doi.org/10.1007/s12555-016-0462-3
- [5] D. Rus and M. T. Tolley, “Design, fabrication and control of soft robots,” Nature, Vol.521, No.7553, pp. 467-475, 2015. https://doi.org/10.1038/nature14543
- [6] W. Zhao, Y. Zhang, and N. Wang, “Soft Robotics: Research, Challenges, and Prospects,” J. Robot. Mechatron., Vol.33, No.1, pp. 45-68, 2021. https://doi.org/10.20965/jrm.2021.p0045
- [7] M. M. Coad et al., “Vine Robots,” IEEE Robot. Autom. Mag., Vol.27, No.3, pp. 120-132, 2020. https://doi.org/10.1109/MRA.2019.2947538
- [8] T. Mitsuda, “Wrapping Objects with an Automatic Contraction Ring,” J. Robot. Mechatron., Vol.34, No.6, pp. 1424-1430, 2022. https://doi.org/10.20965/jrm.2022.p1424
- [9] K. Tadakuma, M. Kawakami, and H. Furukawa, “From a Deployable Soft Mechanism Inspired by a Nemertea Proboscis to a Robotic Blood Vessel Mechanism,” J. Robot. Mechatron., Vol.34, No.2, pp. 234-239, 2022. https://doi.org/10.20965/jrm.2022.p0234
- [10] H. Mochiyama, M. Gunji, and R. Niiyama, “Ostrich-Inspired Soft Robotics: A Flexible Bipedal Manipulator for Aggressive Physical Interaction,” J. Robot. Mechatron., Vol.34, No.2, pp. 212-218, 2022. https://doi.org/10.20965/jrm.2022.p0212
- [11] C. Y. Liu and W. H. Liao, “A Snake Robot Using Shape Memory Alloys,” 2004 IEEE Int. Conf. on Robotics and Biomimetics, pp. 601-605, 2004. https://doi.org/10.1109/ROBIO.2004.1521848
- [12] T. Umedachi, V. Vikas, and B. A. Trimmer, “Highly deformable 3-D printed soft robot generating inching and crawling locomotions with variable friction legs,” 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4590-4595, 2013. https://doi.org/10.1109/IROS.2013.6697016
- [13] H.-T. Lin, G. G. Leisk, and B. Trimmer, “GoQBot: A caterpillar-inspired soft-bodied rolling robot,” Bioinspir. Biomim., Vol.6, No.2, Article No.026007, 2011. https://doi.org/10.1088/1748-3182/6/2/026007
- [14] W. Wang, Y. Wang, K. Wang, H. Zhang, and J. Zhang, “Analysis of the kinematics of module climbing caterpillar robots,” 2008 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics, pp. 84-89, 2008. https://doi.org/10.1109/AIM.2008.4601639
- [15] R. Yamashina, M. Kuroda, and T. Yabuta, “Caterpillar robot locomotion based on Q-learning using objective/subjective reward,” 2011 IEEE/SICE Int. Symp. on System Integration (SII), pp. 1311-1316, 2011. https://doi.org/10.1109/SII.2011.6147638
- [16] S. Terryn, J. Brancart, D. Lefeber, G. van Assche, and B. Vanderborght, “Self-healing soft pneumatic robots,” Sci. Robot., Vol.2, Issue 9, 2017. https://doi.org/10.1126/scirobotics.aan4268
- [17] S. Terryn et al., “A review on self-healing polymers for soft robotics,” Mater. Today, Vol.47, pp. 187-205, 2021. https://doi.org/10.1016/j.mattod.2021.01.009
- [18] B. Zhang et al., “Self-Healing Four-Dimensional Printing with an Ultraviolet Curable Double-Network Shape Memory Polymer System,” ACS Appl. Mater. Interfaces, Vol.11, No.10, pp. 10328-10336, 2019. https://doi.org/10.1021/acsami.9b00359
- [19] T. Kakuta, Y. Takashima, M. Nakahata, M. Otsubo, H. Yamaguchi, and A. Harada, “Preorganized Hydrogel: Self-Healing Properties of Supramolecular Hydrogels Formed by Polymerization of Host–Guest-Monomers that Contain Cyclodextrins and Hydrophobic Guest Groups,” Adv. Mater., Vol.25, No.20, pp. 2849-2853, 2013. https://doi.org/10.1002/adma.201205321
- [20] T. Kakuta, Y. Takashima, and A. Harada, “Highly Elastic Supramolecular Hydrogels Using Host–Guest Inclusion Complexes with Cyclodextrins,” Macromolecules, Vol.46, No.11, pp. 4575-4579, 2013. https://doi.org/10.1021/ma400695p
- [21] M. Nakahata, Y. Takashima, H. Yamaguchi, and A. Harada, “Redox-responsive self-healing materials formed from host–guest polymers,” Nat. Commun., Vol.2, No.1, Article No.511, 2011. https://doi.org/10.1038/ncomms1521
- [22] J. M. Jani, M. Leary, A. Subic, and M. A. Gibson, “A review of shape memory alloy research, applications and opportunities,” Mater. & Des. (1980–2015), Vol.56, pp. 1078-1113, 2014. https://doi.org/10.1016/j.matdes.2013.11.084
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.