Paper:
Proposal for Navigation System Using Three-Dimensional Maps—Self-Localization Using a 3D Map and Slope Detection Using a 2D Laser Range Finder and 3D Map
Neng Chen, Shinichiro Suga, Masato Suzuki, Tomokazu Takahashi, Yasushi Mae, Yasuhiko Arai, and Seiji Aoyagi
Kansai University
3-3-35 Tamate-cho, Suita, Osaka 564-8680, Japan

Many teams participating in robotic competitions achieve localization using a 2D map plotted using adaptive Monte Carlo localization, a robot operating system (ROS) open-source software program. However, outdoor environments often include nonlevel terrain such as slopes. In the indoor environment of multilevel structures, the data representing different levels overlap on the map. These factors can lead to localization failures. To resolve this problem, we develop a software by combining HDL localization, which is an ROS open-source software, with our own program, and use it to achieve localization based on a 3D map. Furthermore, the authors observe the erroneous recognition of a slope as a forward obstacle during a competition event. To resolve this, we propose a method to correct erroneous recognition of obstacles using a 2D laser range finder and 3D map and confirm its validity in an experiment carried out on a slope on a university campus.
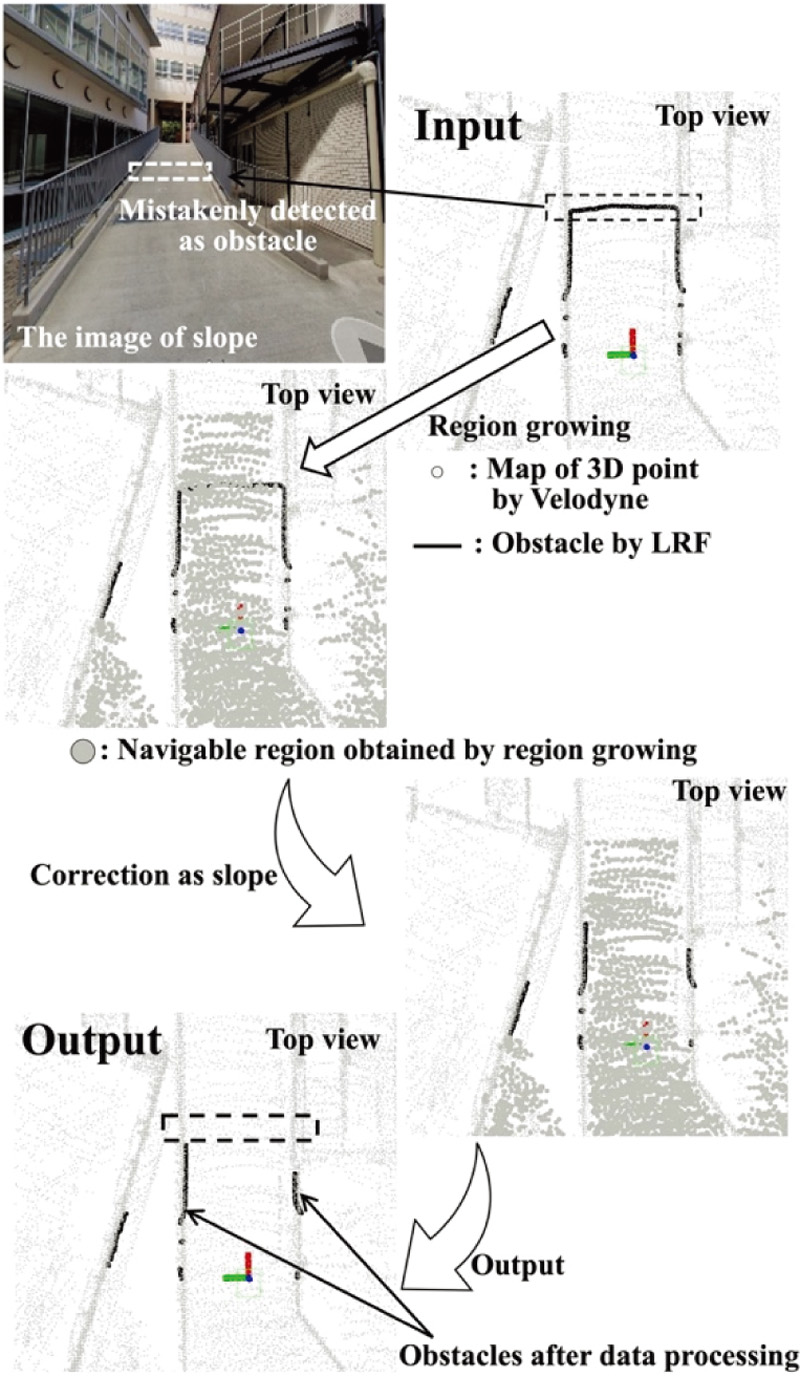
Correct slopes misidentified as obstacles
- [1] O. Yavoruk, “How does the Monte Carlo method work?,” arXiv preprint, arXiv:1909.13212, 2019. https://doi.org/10.48550/arXiv.1909.13212
- [2] K. Charalampous, I. Kostavelis, D. Chrysostomou et al., “3d maps registration and path planning for autonomous robot navigation,” arXiv preprint, arXiv:1312.2822, 2013. https://doi.org/10.48550/arXiv.1312.2822
- [3] S. Niijima, Y. Sasaki, and H. Mizoguchi, “Real-time autonomous navigation of an electric wheelchair in large-scale urban area with 3D map,” Advanced Robotics, Vol.33, Issue 19, pp. 1006-1018, 2019. https://doi.org/10.1080/01691864.2019.1642240
- [4] Z. Fan et al., “3D Mapping of Multi-floor Buildings Based on Sensor Fusion,” 2017 Int. Conf. on Industrial Informatics, Computing Technology, Intelligent Technology, Industrial Information Integration (ICIICII), pp. 10-15, 2017. https://doi.org/10.1109/ICIICII.2017.10
- [5] S. Leisiazar, M. Mahdavian, and E. J. Park, “Real-time Mapping of Multi-Floor Buildings Using Elevators,” 2022 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), pp. 314-321, 2022. https://doi.org/10.1109/AIM52237.2022.9863407
- [6] K. Koide, J. Miura, and E. Menegatti, “A Portable 3D LIDAR-based System for Long-term and Wide-area People Behavior Measurement,” Advanced Robotic Systems, 2019.
- [7] M. Gao, J. Tang, Y. Yang, Z. He, and Y. Zeng, “An Obstacle Detection and Avoidance System for Mobile Robot with a Laser Radar,” 2019 IEEE 16th Int. Conf. on Networking, Sensing and Control (ICNSC), pp. 63-68, 2019. https://doi.org/10.1109/ICNSC.2019.8743288
- [8] Y. Peng, D. Qu, Y. Zhong, S. Xie, J. Luo, and J. Gu, “The Obstacle Detection and Obstacle Avoidance Algorithm Based on 2-D Lidar,” 2015 IEEE Int. Conf. on Information and Automation, pp. 1648-1653, 2015. https://doi.org/10.1109/ICInfA.2015.7279550
- [9] D. Ghorpade, A. D. Thakare, and S. Doiphode, “Obstacle Detection and Avoidance Algorithm for Autonomous Mobile Robot Using 2D LiDAR,” 2017 Int. Conf. on Computing, Communication, Control and Automation (ICCUBEA), 2017. https://doi.org/10.1109/ICCUBEA.2017.8463846
- [10] R. Aeschimann and P. V. K. Borges, “Ground or obstacles? Detecting clear paths in vehicle navigation,” 2015 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3927-3934, 2015. https://doi.org/10.1109/ICRA.2015.7139747
- [11] S. Thrun, “Learning occupancy grid maps with forward sensor models,” Autonomous Robots, Vol.15, Issue 2, pp. 111-127, 2003. https://doi.org/10.1023/A:1025584807625
- [12] P. Biber and W. Straßer, “The normal distributions transform: A new approach to laser scan matching,” Proc. of 2003 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2003), Vol.3, 2003. https://doi.org/10.1109/IROS.2003.1249285
- [13] K. Inui et al., “Distortion correction of laser point cloud from in-vehicle laser scanner based on NDT scan-matching,” Trans. of the JSME, Vol.83, No.854, Article No.17-00061, 2017 (in Japanese). https://doi.org/10.1299/transjsme.17-00061
- [14] A. Chida and H. Masuda, “Estimation of bounded faces in manufacturing plants based on large-scale point-clouds,” J. of the Japan Society of Precision Engineering, 2015 (in Japanese). https://doi.org/10.11522/pscjspe.2015S.0_515
- [15] N. Hidaka, “A Study on Automatic Generation Method of 3D Polygon Models for Maintenance and Management from Measured Point Cloud Data of Civil Engineering Structures,” Doctoral thesis, School of Engineering, Graduate School of Engineering, Osaka University, 2018 (in Japanese). https://doi.org/10.18910/69597
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.