Paper:
Learning Variable Admittance Control for Human-Robot Collaborative Manipulation
Tasuku Yamawaki
 , Liem Duc Tran, and Masahito Yashima
, Liem Duc Tran, and Masahito Yashima
National Defense Academy of Japan
1-10-20 Hashirimizu, Yokosuka, Kanagawa 239-8686, Japan

Human-robot collaboration has garnered significant attention in the manufacturing industry due to its potential for optimizing the strengths of both human operators and robots. In this study, we present a novel variable admittance control method based on iterative learning for collaborative manipulation, aiming to enhance operational performance. This proposed method enables the adjustment of admittance to meet task requirements without the need for heuristic designs of admittance modulation strategies. Furthermore, the incorporation of dynamic time warping in human operational detection assists in mitigating the learning performance decline caused by fluctuations in human operations. To validate the effectiveness of our approach, we conducted extensive experiments. The results of these experiments highlight that the proposed method enhances human-robot collaborative manipulation performance compared to conventional methods. This approach also exhibits the potential for addressing complex tasks that are typically influenced by diverse human factors, including skill level and intention.
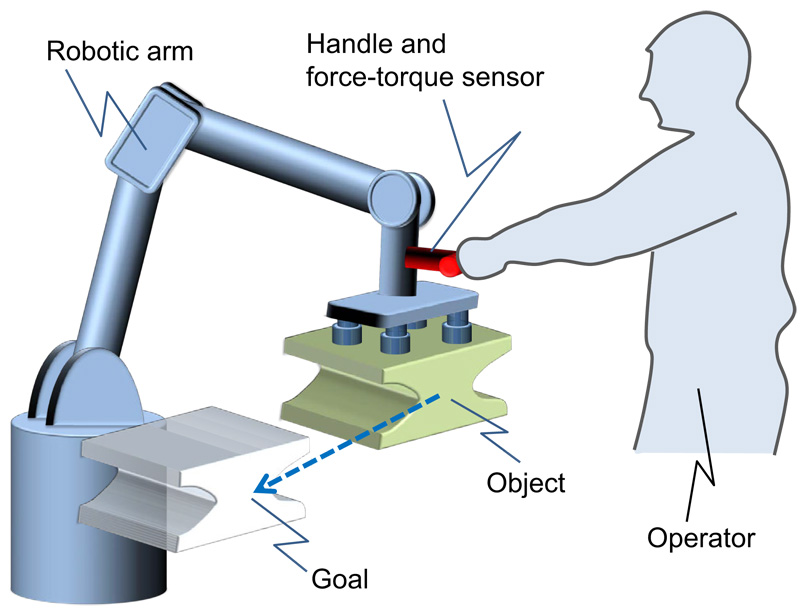
Human-robot collaborative manipulation
- [1] S. Grahn, B. Langbeck, K. Johansen, and B. Backman, “Potential advantages using large anthropomorphic robots in human-robot collaborative, hand guided assembly,” Procedia CIRP, Vol.44, 6th CIRP Conf. on Assembly Technologies and Systems (CATS), pp. 281-286, 2016. https://doi.org/10.1016/j.procir.2016.02.036
- [2] J. Krüger, T. Lien, and A. Verl, “Cooperation of human and machines in assembly lines,” CIRP Annals, Vol.58, No.2, pp. 628-646, 2009. https://doi.org/10.1016/j.cirp.2009.09.009
- [3] G. Michalos, S. Makris, N. Papakostas, D. Mourtzis, and G. Chryssolouris, “Automotive assembly technologies review: Challenges and outlook for a flexible and adaptive approach,” CIRP J. of Manufacturing Science and Technology, Vol.2, No.2, pp. 81-91, 2010. https://doi.org/10.1016/j.cirpj.2009.12.001
- [4] N. Takesue, H. Murayama, K. Fujiwara, K. Matsumoto, H. Konosu, and H. Fujimoto, “Kinesthetic assistance for improving task performance – The case of window installation assist –,” Int. J. Automation Technol., Vol.3, No.6, pp. 663-670, 2009. https://doi.org/10.20965/ijat.2009.p0663
- [5] N. Hogan, “Impedance control: An approach to manipulation: Part I-III,” ASME J. Dyn. Syst. Meas. Control, Vol.107, No.1, pp. 1-24, 1985. https://doi.org/10.1115/1.3140702
- [6] M. Sharifi, A. Zakerimanesh, J. K. Mehr, A. Torabi, V. K. Mushahwar, and M. Tavakoli, “Impedance variation and learning strategies in human-robot interaction,” IEEE Trans. Cybern., Vol.52, No.7, pp. 6462-6475, 2022. https://doi.org/10.1109/TCYB.2020.3043798
- [7] T. Morizono, H. Kohno, M. Higashi, and Y. Yamada, “A preliminary study for realization of field impedance equalizer with an automatic adjusting function,” Proc. 13th IEEE Int. Workshop on Robot and Human Interactive Communication, pp. 407-412, 2004. https://doi.org/10.1109/ROMAN.2004.1374795
- [8] F. Ficuciello, L. Villani, and B. Siciliano, “Variable impedance control of redundant manipulators for intuitive human-robot physical interaction,” IEEE Trans. Robot., Vol.31, No.4, pp. 850-863, 2015. https://doi.org/10.1109/TRO.2015.2430053
- [9] A. Lecours, B. Mayer-St-Onge, and C. Gosselin, “Variable admittance control of a four-degree-of-freedom intelligent assist device,” Proc. IEEE Int. Conf. Robot. Autom., pp. 3903-3908, 2012. https://doi.org/10.1109/ICRA.2012.6224586
- [10] V. Duchaine and C. M. Gosselin, “General model of human-robot cooperation using a novel velocity based variable impedance control,” 2nd Joint EuroHaptics Conf. and Symp. on Haptic Interfaces for Virtual Environ. and Teleoperator Syst. (WHC’07), pp. 446-451, 2007. https://doi.org/10.1109/WHC.2007.59
- [11] R. Ikeura, T. Moriguchi, and K. Mizutani, “Optimal variable impedance control for a robot and its application to lifting an object with a human,” Proc. of IEEE Int. Workshop Robot Human Interactive Commun., pp. 500-505, 2002. https://doi.org/10.1109/ROMAN.2002.1045671
- [12] V. Duchaine and C. M. Gosselin, “Investigation of human-robot interaction stability using Lyapunov theory,” Proc. IEEE Int. Conf. Robot. Autom., Pasadena, pp. 2189-2194, 2008. https://doi.org/10.1109/ROBOT.2008.4543531
- [13] C. T. Freeman, E. Rogers, J. H. Burridge, A. M. Hughes, and K. L. Meadmore, “Iterative learning control: An overview,” in “Iterative Learning Control for Electrical Stimulation and Stroke Rehabilitation,” London, UK: Springer, pp. 3-16, 2015. https://doi.org/10.1007/978-1-4471-6726-6
- [14] Z. Chen, X. Liang, and M. Zheng, “Knowledge transfer between different UAVs for trajectory tracking,” IEEE Robotics and Automation Letters, Vol.5, No.3, pp. 4939-4946, 2020. https://doi.org/10.1109/LRA.2020.3004776
- [15] Y. Chen, B. Chu, and C. T. Freeman, “Point-to-point iterative learning control with optimal tracking time allocation,” IEEE Trans. on Control Syst. Technol., Vol.26, No.5, pp. 1685-1698, 2018. https://doi.org/10.1109/TCST.2017.2735358
- [16] Y. Li, G. Ganesh, N. Jarrassé, S. Haddadin, A. Albu-Schaeffer, and E. Burdet, “Force, impedance, and trajectory learning for contact tooling and haptic identification,” IEEE Trans. Robot., Vol.34, No.5, pp. 1170-1182, 2018. https://doi.org/10.1109/TRO.2018.2830405
- [17] C. Yang, G. Ganesh, S. Haddadin, S. Parusel, A. Albu-Schaeffer, and E. Burdet, “Human-like adaptation of force and impedance in stable and unstable interactions,” IEEE Trans. Robot., Vol.27, No.5, pp. 918-930, 2011. https://doi.org/10.1109/TRO.2011.2158251
- [18] T. Yamawaki, H. Ishikawa, and M. Yashima, “Iterative learning of variable impedance control for human-robot cooperation,” Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst., pp. 839-844, 2016. https://doi.org/10.1109/IROS.2016.7759148
- [19] M. J. Kim, W. Lee, J. Y. Choi, G. Chung, K.-L. Han, I. S. Choi, C. Ott, and W. K. Chung, “A passivity-based nonlinear admittance control with application to powered upper-limb control under unknown environmental interactions,” IEEE/ASME Trans. on Mechatronics, Vol.24, No.4, pp. 1473-1484, 2019. https://doi.org/10.1109/TMECH.2019.2912488
- [20] E. Burdet and T. Milner, “Quantization of human motions and learning of accurate movements,” Biol. Cybern., Vol.78, pp. 307-318, 1998. https://doi.org/10.1007/s004220050435
- [21] D. E. Meyer, J. E. K. Smith, S. Kornblum, R. A. Abrams, and C. E. Wright, “Speed-accuracy tradeoffs in aimed movements: Toward a theory of rapid voluntary action,” M. Jeannerod (Ed.), “Attention and Performance XIII,” Psychology Press, pp. 173-226, 1990.
- [22] C. Harris and D. Wolpert, “Signal-dependent noise determines motor planning,” Nature, Vol.394, pp. 780-784, 1998. https://doi.org/10.1038/29528
- [23] D. J. Berndt and J. Clifford, “Using dynamic time warping to find patterns in time series,” Proc. of 3rd Int. Conf. on Knowl. Discovery and Data Mining (AAAIWS’94), pp. 359-370, 1994.
- [24] C. Faloutsos, M. Ranganathan, and Y. Manolopoulos, “Fast subsequence matching in time-series databases,” SIGMOD Rec., Vol.23, No.2, pp. 419-429, 1994. https://doi.org/10.1145/191843.191925
- [25] M. Vlachos, G. Kollios, and D. Gunopulos, “Discovering similar multidimensional trajectories,” Proc. of 18th Int. Conf. Data Eng., pp. 673-684, 2002. https://doi.org/10.1109/ICDE.2002.994784
- [26] M. H. Ko, G. West, S. Venkatesh, and M. Kumar, “Using dynamic time warping for online temporal fusion in multisensor systems,” Inf. Fusion, Vol.9, No.3, pp. 370-388, 2008.
- [27] Y. Yamada, H. Konosu, T. Morizono, and Y. Umetani, “Proposal of skill-assist: A system of assisting human workers by reflecting their skills in positioning tasks,” Proc. of IEEE Int. Conf. Syst. Man Cybern., Vol.4, pp. 11-16, 1999. https://doi.org/10.1109/ICSMC.1999.812368
- [28] D. M. Wolpert and Z. Ghahramani, “Computational principles of movement neuroscience,” Nature Neuroscience, Vol.3, pp. 1212-1217, 2000. https://doi.org/10.1038/81497
- [29] S. Nakagawa and I. C. Cuthill, “Effect size, confidence interval and statistical significance: A practical guide for biologists,” Biol. Rev., Vol.82, pp. 591-605, 2007. https://doi.org/10.1111/j.1469-185X.2007.00027.x
- [30] G. Cumming, “The new statistics: Why and how,” Psychol. Sci., Vol.25, No.1, pp. 7-29, 2014. https://doi.org/10.1177/0956797613504966
- [31] Y. Hochberg and A. C. Tamhane, “Multiple Comparison Procedures,” John Wiley & Sons, Inc., 1987. https://doi.org/10.1002/9780470316672
- [32] J. Cohen, “Statistical Power Analysis for the Behavioral Sciences,” 2nd ed., New York: Routledge, 1988. https://doi.org/10.4324/9780203771587
- [33] T. Milner, Z. Firouzimehr, S. Babadi, and D. Ostry, “Different adaptation rates to abrupt and gradual changes in environmental dynamics,” Experimental Brain Research, Vol.236, pp. 2923-2933, 2018. https://doi.org/10.1007/s00221-018-5348-6
- [34] J. W. Grice and P. T. Barrett, “A note on Cohen’s overlapping proportions of normal distributions,” Psychol. Rep., Vol.115, No.3, pp. 741-747, 2014. https://doi.org/10.2466/03.PR0.115c29z4
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.