Paper:
Self-Localization Using Trajectory Attractors in Outdoor Environments
Ken Yamane and Mitsunori Akutsu
Teikyo University
1-1 Toyosatodai, Utsunomiya, Tochigi 320-8551, Japan

Self-localization in probabilistic robotics requires detailed, geographically consistent environmental maps, which increases the computational cost. In this study, we propose a simple self-localization method that does not require such maps. In the proposed method, the order structure, such as the mobile robot’s navigation route, is embedded as trajectory attractors in the state space of a nonmonotone neural network, and self-position estimation is performed by processing based on the autonomous dynamics of the network. From experiments, we demonstrated the basic performance of the proposed method, including robust self-localization in complex outdoor environments. Furthermore, self-localization is possible on multiple courses with overlapping paths by suitably varying the network dynamics based on environmental information. While issues remain, this study points to the great potential of neurodynamics-based robotic self-localization.
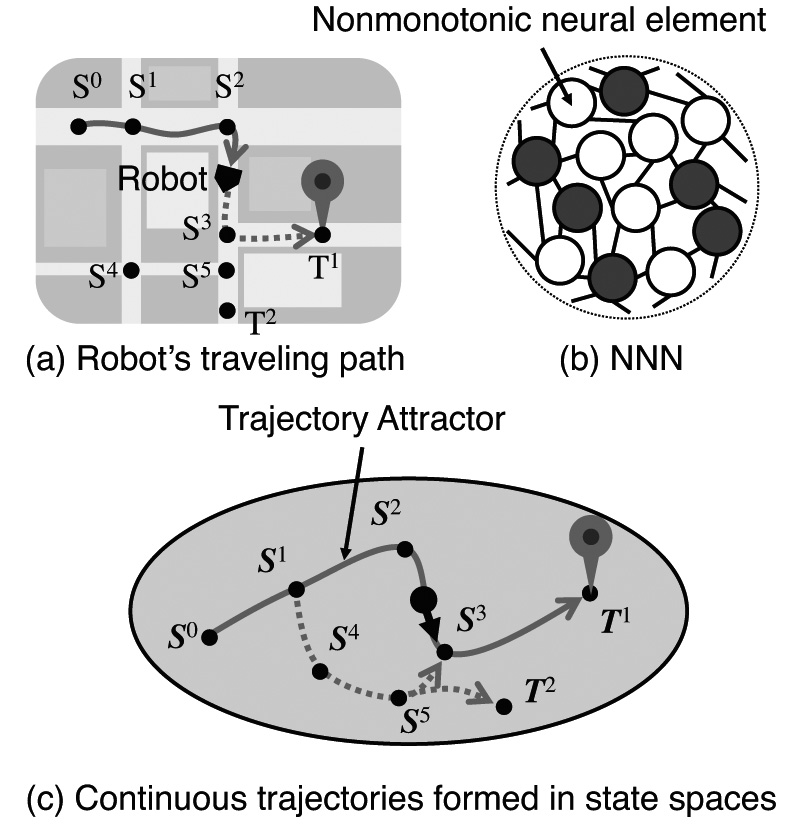
Self-localization using trajectory attractors
- [1] S. Thrun, W. Burgard, and D. Fox, “Probabilistic Robotics,” The MIT Press, 2005.
- [2] W. Hess, D. Kohler, H. Rapp, and D. Andor, “Real-Time Loop Closure in 2D LIDAR SLAM,” Proc. of IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1271-1278, 2016. https://doi.org/10.1109/ICRA.2016.7487258
- [3] S. Yuta, M. Mizukawa, and H. Hashimoto, “Tsukuba Challenge: The Purpose and Results,” J. of The Society of Instrument and Control Engineers, Vol.49, Issue 9, pp. 572-578, 2010 (in Japanese). https://doi.org/10.11499/sicejl.49.572
- [4] M. Tomono, T. Yoshida, K. Irie, and E. Koyanagi, “Analysis and Design of Outdoor Navigation Systems at the Tsukuba Challenge,” J. of the Robotics Society of Japan, Vol.30, Issue 3, pp. 262-270, 2012 (in Japanese). https://doi.org/10.7210/JRSJ.30.262
- [5] S. Yuta, “Tsukuba Challenge: Open Experiments for Autonomous Navigation of Mobile Robots in the City – Activities and Results of the First and Second Stages –,” J. Robot. Mechatron., Vol.30, No.4, pp. 504-512, 2018. https://doi.org/10.20965/jrm.2018.p0504
- [6] Y. Hara, T. Tomizawa, H. Date, Y. Kuroda, and T. Tsubouchi, “Tsukuba Challenge 2019: Task Settings and Experimental Results,” J. Robot. Mechatron., Vol.32, No.6, pp. 1104-1111, 2020. https://doi.org/10.20965/jrm.2020.p1104
- [7] M. Akutsu, Z. Jin, S. Yoshizawa, and K. Yamane, “Report on Tsukuba Challenge 2022 Project by Yamane Laboratory, Teikyo University,” Team No.2205, Tsukuba Challenge Technical Reports 2022, 2022 (in Japanese).
- [8] N. Akai, L. Y. Morales, and H. Murase, “Teaching-Playback Navigation Without a Consistent Map,” J. Robot. Mechatron., Vol.30, No.4, pp. 591-597, 2018. https://doi.org/10.20965/jrm.2018.p0591
- [9] Y. Hosoda, R. Sawahashi, N. Machinaka, R. Yamazaki, Y. Sadakuni, K. Onda, R. Kusakari, M. Kimba, T. Oishi, and Y. Kuroda, “Robust Road-Following Navigation System with a Simple Map,” J. Robot. Mechatron., Vol.30, No.4, pp. 552-562, 2018. https://doi.org/10.20965/jrm.2018.p0552
- [10] K. Takahashi, J. Arima, T. Hayata, Y. Nagai, N. Sugiura, R. Fukatsu, W. Yoshiuchi, and Y. Kuroda, “Development of EdgeNode Map Based Navigation System Without Requirement of Prior Sensor Data Collection,” J. Robot. Mechatron., Vol.32, No.6, pp. 1112-1120, 2020. https://doi.org/10.20965/jrm.2020.p1112
- [11] H. Shimada, R. Ueda, and Y. Hayashibara, “Proposal of Navigation by Scenarios Using Topological Map – Acquisition and Evaluation of Information that Human Use for Route Guidance –,” Proc. of JSME Annual Conf. on Robotics and Mechatronics (Robomec), Vol.2020, Session ID 2P1-K02, 2020 (in Japanese). https://doi.org/10.1299/jsmermd.2020.2P1-K02
- [12] H. Shimada, R. Ueda, and Y. Hayashibara, “Proposal of Navigation by Scenarios Using Topological Map – Real Robot Navigation Based on Scenarios –,” Proc. of SI2020, pp. 1048-1053, 2020 (in Japanese).
- [13] M. Hara, H. Shimada, R. Ueda, and Y. Hayashibara, “Navigation by Scenarios Using Topological Map – Proposal of Passage Classification Method Using Omnidirectional Camera,” Proc. of JSME Annual Conf. on Robotics and Mechatronics (Robomec), Vol.2022, Session ID 2P2-L03, 2022 (in Japanese). https://doi.org/10.1299/jsmermd.2022.2P2-L03
- [14] M. Morita, “Memory and Learning of Sequential Patterns by Nonmonotone Neural Networks,” Neural Networks, Vol.9, No.8, pp. 1477-1489. 1996. https://doi.org/10.1016/s0893-6080(96)00021-4
- [15] M. Morita, K. Murata, and S. Morokami, “Context-dependent sequential recall by a trajectory attractor network with selective desensitization,” Proc. of the Third Int. Conf. on Neural Networks and Artificial Intelligence, pp. 235-238, 2003.
- [16] M. Morita, K. Matsuzawa, and S. Morokami, “A model of context-dependent association using selective desensitization of nonmonotonic neural elements,” Systems and Computers in Japan, Vol.36, No.7, pp. 73-83, 2005. https://doi.org/10.1002/scj.10477
- [17] K. Yamane, “Estimation of Hand Motions Based on Distributed Representations and Neurodynamics,” Trans. of the Japanese Society for Artificial Intelligence, Vol.32, No.1, Article No.A-G43_1-12, 2017 (in Japanese). https://doi.org/10.1527/tjsai.A-G43
- [18] K. Inoue, S. A. Rahok, and K. Ozaki, “Proposal and Consideration of Design Policy for Autonomous Mobile Robots in Real World Robot Challenge,” J. of the Robotics Society of Japan, Vol.30, No.3, pp. 234-244, 2012 (in Japanese). https://doi.org/10.7210/jrsj.30.234
- [19] N. Akai, K. Inoue, and K. Ozaki, “Autonomous Navigation Based on Magnetic and Geometric Landmarks on Environmental Structure in Real World,” J. Robot. Mechatron., Vol.26, No.2, pp. 158-165, 2014. https://doi.org/10.20965/jrm.2014.p0158
- [20] N. Akai, S. A. Rahok, K. Inoue, and K. Ozaki, “Development of magnetic navigation method based on distributed control system using magnetic and geometric landmarks,” Robomech J., Vol.1, Article No.21, 2014. https://doi.org/10.1186/s40648-014-0021-8
- [21] N. Akai, S. A. Rahok, K. Katayose, R. Shimada, K. Inoue, and K. Ozaki, “Implementation of Magnetic Navigation Method based on Experimental Analysis of Magnetic Field,” J. of the Robotics Society of Japan, Vol.32, No.4, pp. 395-402, 2014 (in Japanese). https://doi.org/10.7210/jrsj.32.395
- [22] S. A. Rahok, H. Oneda, T. Nakayama, K. Inoue, S. Osawa, A. Tanaka, and K. Ozaki, “Enhancement of Scan Matching Using an Environmental Magnetic Field,” J. Robot. Mechatron., Vol.30, No.4, pp. 532-539, 2018. https://doi.org/10.20965/jrm.2018.p0532
- [23] I. Nagai, J. Sakai, and K. Watanabe, “Indoor Self-Localization Using Multiple Magnetic Sensors,” J. Robot. Mechatron., Vol.31, No.2, pp. 203-211, 2019. https://doi.org/10.20965/jrm.2019.p0203
- [24] M. McCloskey and N. Cohen, “Catastrophic interference in connectionist networks: The sequential learning problem,” The Psychology of Learning and Motivation, Vol.24, pp. 109-165, 1989. https://doi.org/10.1016/S0079-7421(08)60536-8
- [25] K. Yamane and M. Morita, “Brain-like Computing Based on Distributed Representations and Neurodynamics,” New Generation Computing, Vol.28, Issue 4, pp. 321-338, 2010. https://doi.org/10.1007/s00354-009-0092-x
- [26] A. Handa, A. Suzuki, H. Date, R. Mitsudome, T. Tsubouchi, and A. Ohya, “Navigation Based on Metric Route Information in Places Where the Mobile Robot Visits for the First Time,” J. Robot. Mechatron., Vol.31, Np.2, pp. 180-193, 2019. https://doi.org/10.20965/jrm.2019.p0180
- [27] N. Akai, T. Hirayama, and H. Murase, “Persistent Homology in LiDAR-Based Ego-Vehicle Localization,” Proc. of 2021 IEEE Intelligent Vehicles Symposium (IV), pp. 889-896, 2021. https://doi.org/10.1109/IV48863.2021.9575312
- [28] S. Wakita, T. Nakamura, and H. Hachiya, “Laser VAE for Feature Description and an Application of Global Self-localization,” Trans. of The Society of Instrument and Control Engineers, Vol.55, No.7, pp. 476-483, 2019 (in Japanese). https://doi.org/10.9746/sicetr.55.476
- [29] T. Hasuo, K. Yamane, and M. Morita, “Context-Dependent Processing of Spatiotemporal Patterns Based on Interaction Between Neurodynamical Systems,” Advances in Cognitive Neurodynamics ICCN 2007, pp. 231-236, 2008. https://doi.org/10.1007/978-1-4020-8387-7_41
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.