Paper:
Development of Compact 3-Degree-of-Freedom Oscillatory Actuator
Akira Heya*
 , Ryosuke Nakamura**, and Katsuhiro Hirata**
, Ryosuke Nakamura**, and Katsuhiro Hirata**
*Department of Mechanical Systems Engineering, Nagoya University
Furo-cho, Chikusa-ku, Nagoya, Aichi 464-8601, Japan
**Division of Materials and Manufacturing Science, Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan

Haptics applications are receiving increasing attention in entertainment, medical support systems, and various industries. Three-dimensional (3D) haptics is important to provide users real experiences. Conventional haptic devices consist of many motors and mechanical elements grounded in an environment. Therefore, they are large in size and heavy. Haptic devices using asymmetric vibrations can display illusion forces with mobile structures. However, they need additional structures (comprising actuators) to generate a 3D illusion force; however, the operational mechanism becomes complex. To solve this problem, we propose the use of a 3-degree-of-freedom (3DOF) oscillatory actuator that can generate a 3DOF vibration using only one actuator. This study describes the basic characteristics and operating verification of the 3DOF oscillatory actuator. The static thrust characteristics are quantified and analyzed using a finite element method. The dynamics are calculated based on numerical simulations using a dynamic model. The prototype’s experimental results show that the 3DOF actuator can generate 3DOF vibration.
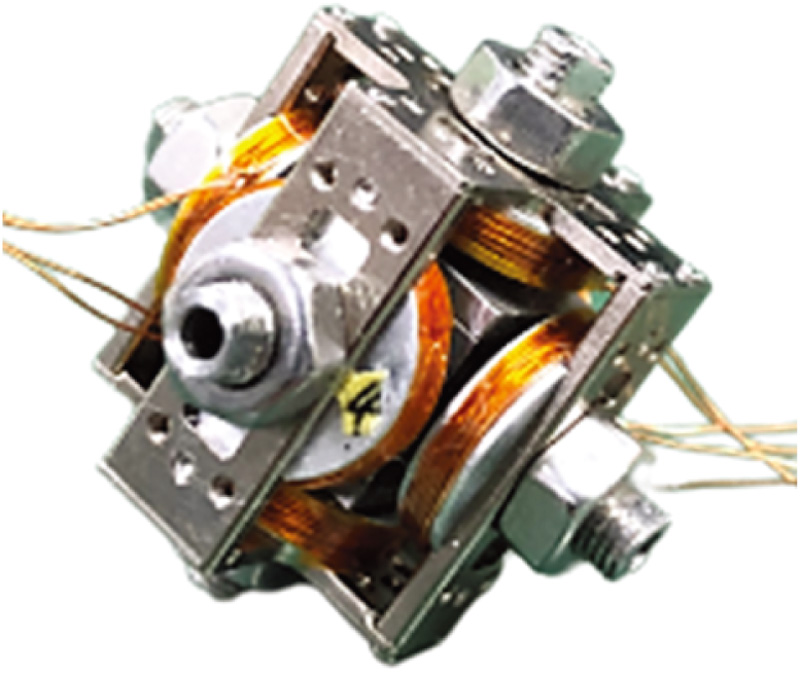
Prototype of the compact 3DOF-OA
- [1] L. A. Jones and I. W. Hunter, “Effect of fatigue on force sensation,” Experimental Neurology, Vol.81, No.3, pp. 640-650, 1983. https://doi.org/10.1016/0014-4886(83)90332-1
- [2] U. Proske and S. C. Gandevia, “The proprioceptive senses: Their roles in signaling body shape, body position and movement, and muscle force,” Physiological Reviews, Vol.92, No.4, pp. 1651-1697, 2012. https://doi.org/10.1152/physrev.00048.2011
- [3] V. Hayward, O. R. Astley, M. Cruz-Hernandez, D. Grant, and G. Robles-De-La-Torre, “Haptic interfaces and devices,” Sensor Review, Vol.24, No.1, pp. 16-29, 2004. https://doi.org/10.1108/02602280410515770
- [4] T. H. Massie and J. K. Salisbury, “The PHANToM haptic interface: A device for probing virtual objects,” Proc. of the ASME Winter Annual Meeting, Symp. on Haptic Interfaces for Virtual Environment and Teleoperator Systems, pp. 295-300, 1994.
- [5] A. J. Silva, O. A. D. Ramirez, V. P. Vega, and J. P. O. Oliver, “PHANToM OMNI haptic device: Kinematic and manipulability,” 2009 Electronics, Robotics and Automotive Mechanics Conf. (CERMA), pp. 193-198, 2009. https://doi.org/10.1109/CERMA.2009.55
- [6] S. Martin and N. Hillier, “Characterisation of the Novint Falcon haptic device for application as a robot manipulator,” Australasian Conf. on Robotics and Automation (ACRA), 2009.
- [7] N. Karbasizadeh, A. Aflakiyan, M. Zarei, M. T. Masouleh, and A. Kalhor, “Dynamic identification of the Novint Falcon haptic device,” 2016 4th Int. Conf. on Robotics and Mechatronics (ICROM), pp. 518-523, 2016. https://doi.org/10.1109/ICRoM.2016.7886795
- [8] L. Liu, S. Miyake, N. Maruyama, K. Akahane, and M. Sato, “Development of two-handed multi-finger haptic interface SPIDAR-10,” Proc. of the 9th Int. Conf. EuroHaptics 2014, Part 2, pp. 176-183, 2014. https://doi.org/10.1007/978-3-662-44196-1_22
- [9] K. Nagai, S. Tanoue, K. Akahane, and M. Sato, “Wearable 6-DoF wrist haptic device ‘SPIDAR-W’,” Proc. of the SIGGRAPH Asia 2015 Haptic Media and Contents Design, Article No.19, 2015. https://doi.org/10.1145/2818384.2818403
- [10] T. Endo, H. Kawasaki, T. Mouri, Y. Doi, T. Yoshida, Y. Ishigure, H. Shimomura, M. Matsumura, and K. Koketsu, “Five-fingered haptic interface robot: HIRO III,” 3rd Joint EuroHaptics Conf. and Symp. on Haptic Interfaces for Virtual Environment and Teleoperator Systems (World Haptics 2009), pp. 458-463, 2009. https://doi.org/10.1109/WHC.2009.4810812
- [11] T. Amemiya and T. Maeda, “Asymmetric oscillation distorts the perceived heaviness of handheld objects,” IEEE Trans. on Haptics, Vol.1, No.1, pp. 9-18, 2008. https://doi.org/10.1109/TOH.2008.5
- [12] T. Amemiya, H. Ando, and T. Maeda, “Virtual force display: Direction guidance using asymmetric acceleration via periodic translational motion,” 1st Joint EuroHaptics Conf. and Symp. on Haptic Interfaces for Virtual Environment and Teleoperator Systems (World Haptics 2005), pp. 619-622, 2005. https://doi.org/10.1109/WHC.2005.146
- [13] N. Nakamura and Y. Fukui, “An innovative non-grounding haptic interface ‘GyroCubeSensuous’ displaying illusion sensation of push, pull and lift,” ACM SIGGRAPH 2005 Posters, Article No.92, 2005. https://doi.org/10.1145/1186954.1187059
- [14] N. Nakamura and Y. Fukui, “Development of fingertip type non-grounding force feedback display,” 2nd Joint EuroHaptics Conf. and Symp. on Haptic Interfaces for Virtual Environment and Teleoperator Systems, pp. 582-583, 2007. https://doi.org/10.1109/WHC.2007.40
- [15] J. Rekimoto, “Traxion: A tactile interaction device with virtual force sensation,” Proc. of the 26th annual ACM Symp. on User Interfaces Software and Technology (UIST’13), pp. 427-432, 2013. https://doi.org/10.1145/2501988.2502044
- [16] H. Ando, J. Watanabe, M. Inami, M. Sugimoto, and T. Maeda, “A fingernail-mounted tactile display for augmented reality systems,” Electronics and Communications in Japan (Part II: Electronics), Vol.90, No.4, pp. 56-65, 2007. https://doi.org/10.1002/ecjb.20355
- [17] Y. Kono, T. Yoshimoto, and K. Hirata, “Characteristics analysis of a haptic device using a 2-DOF linear oscillatory actuator,” Int. J. of Applied Electromagnetics and Mechanics, Vol.45, Nos.1-4, pp. 909-916, 2014. https://doi.org/10.3233/JAE-141924
- [18] M. Kato, K. Hirata, and K. Fujita, “Dynamic characteristics of three-degree-of-freedom resonant actuator,” The Int. J. for Computation and Mathematics in Electrical and Electronic Engineering, Vol.37, No.5, pp. 1566-1574, 2018. https://doi.org/10.1108/COMPEL-12-2017-0513
- [19] A. Heya, K. Hirata, T. Matsushita, and Y. Kono, “Design and analysis of a three-degree-of-freedom linear oscillatory actuator,” IEEE Trans. on Magnetics, Vol.56, No.2, Article No.6701404, 2020. https://doi.org/10.1109/TMAG.2019.2952473
- [20] R. Nakamura, A. Heya, and K. Hirata, “Performance analysis of a compact three-degree-of-freedom oscillatory actuator for haptic device,” IEEJ Trans. on Electrical and Electronic Engineering, Vol.17, No.6, pp. 881-889, 2022. https://doi.org/10.1002/tee.23577
- [21] J. P. Webb and B. Forghani, “T-Omega method using hierarchal edge elements,” IEE Proc. – Science, Measurement and Technology, Vol.142, No.2, pp. 133-141, 1995. https://doi.org/10.1049/ip-smt:19951439
- [22] J. P. Webb and B. Forghani, “DC current distributions and magnetic fields using the T-omega edge-element method,” IEEE Trans. on Magnetics, Vol.31, No.3, pp. 1444-1447, 1995. https://doi.org/10.1109/20.376300
- [23] T. Tanabe, H. Yano, H. Endo, S. Ino, and H. Iwata, “Pulling illusion based on the phase difference of the frequency components of asymmetric vibrations,” IEEE/ASME Trans. on Mechatronics, Vol.26, No.1, pp. 203-213, 2021. https://doi.org/10.1109/TMECH.2020.3009384
- [24] M. Kato, J. Nitta, and K. Hirata, “Optimization of asymmetric acceleration waveform for haptic device driven by two-degree-of-freedom oscillatory actuator,” IEEJ J. of Industry Applications, Vol.5, No.3, pp. 215-220, 2016. https://doi.org/10.1541/ieejjia.5.215
- [25] R. Nakamura, A. Heya, and K. Hirata, “Miniaturization consideration of a three-degree-of-freedom linear oscillatory actuator for haptic device integrated with support mechanism,” J. of the Japan Society of Applied Electromagnetics and Mechanics, Vol.29, No.2, pp. 408-413, 2021 (in Japanese). https://doi.org/10.14243/jsaem.29.408
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.