Paper:
Decentralized Control Mechanism Underlying Morphology-Dependent Quadruped Turning
Hayato Amaike*,**, Akira Fukuhara*
 , Takeshi Kano*
, and Akio Ishiguro*
, Takeshi Kano*
, and Akio Ishiguro*
*Research Institute of Electrical Communication, Tohoku University
2-1-1 Katahira, Aoba-ku, Sendai, Miyagi 980-8577, Japan
**Graduate School of Biomedical Engineering, Tohoku University
6-6 Aoba, Aramaki, Aoba-ku, Sendai, Miyagi 980-8579, Japan

Quadruped mammals can control the movement of their center of gravity when turning by skillfully utilizing their bodies to achieve adaptive turning movements. Interestingly, the low-speed turning behavior also changes depending on the animal’s morphology. Therefore, this study aims to understand the control algorithm of low-speed turning, which can reproduce the turning behavior according to the location of the center of gravity. Specifically, we constructed a control algorithm based on the knowledge that animals steer with the leg closest to the center of gravity and verified it with a quadruped robot whose center of gravity could be adjusted. Consequently, the behavior observed in animals was successfully reproduced, with a stable and large turning angle per time when the proposed control algorithm was used.
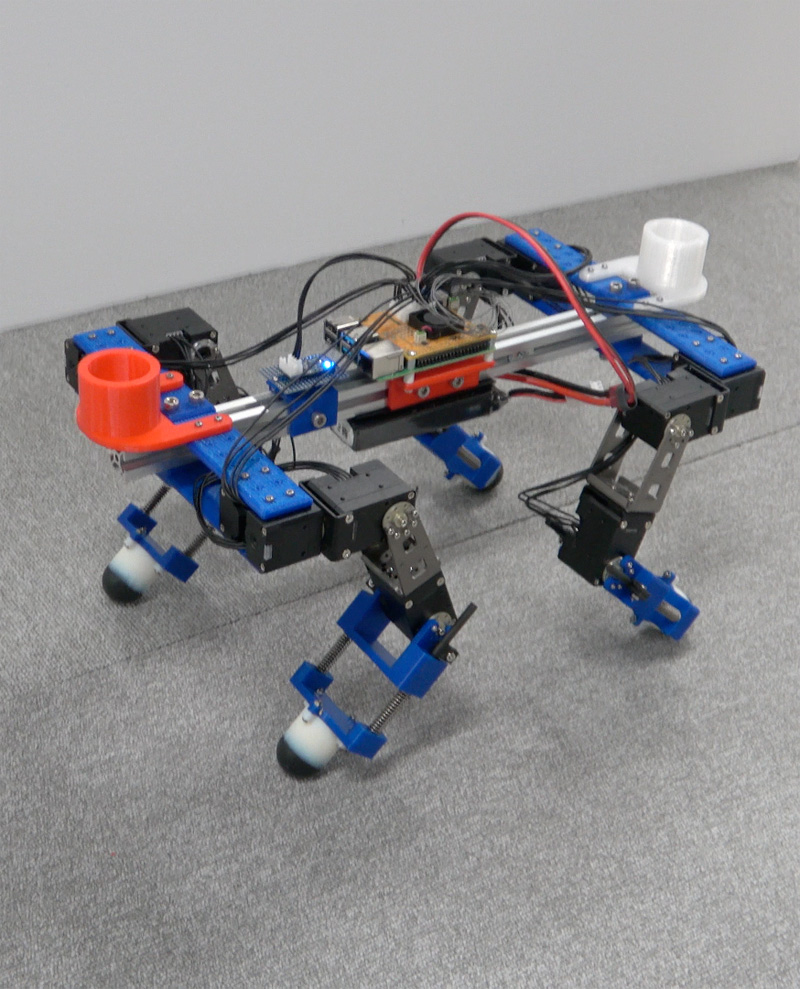
Quadruped robot developed for turning experiments
- [1] J. W. Wilson, M. G. L. Mills, R. P. Wilson, G. Peters, M. E. J. Mills, J. R. Speakman, S. M. Durant, N. C. Bennett, N. J. Marks, and M. Scantlebury, “Cheetahs, Acinonyx jubatus, balance turn capacity with pace when chasing prey,” Biol. Lett., Vol.9, No.5, pp. 5-8, 2013. https://doi.org/10.1098/rsbl.2013.0620
- [2] A. M. Wilson, T. Y. Hubel, S. D. Wilshin, J. C. Lowe, M. Lorenc, O. P. Dewhirst, H. L. A. Bartlam-Brooks, R. Diack, E. Bennitt, K. A. Golabek, R. C. Woledge, J. W. McNutt, N. A. Curtin, and T. G. West, “Biomechanics of predator-prey arms race in lion, zebra, cheetah and impala,” Nature, Vol.554, No.7691, pp. 183-188, 2018. https://doi.org/10.1038/nature25479
- [3] A. A. Biewener, “Animal locomotion,” Oxford Animal Biology Series, Oxford University Press, Oxford, 2003.
- [4] A. Patel and M. Braae, “Rapid turning at high-speed: Inspirations from the cheetah’s tail,” IEEE Int. Conf. Intell. Robots Syst., pp. 5506-5511, 2013. https://doi.org/10.1109/IROS.2013.6697154
- [5] J. R. Usherwood and A. M. Wilson, “No force limit on greyhound sprint speed,” Nature, Vol.438, pp. 753-754, 2005. https://doi.org/10.1038/438753a
- [6] D. Eilam, “Influence of body morphology on turning behavior in carnivores,” J. Mot. Behav., Vol.26, No.1, pp. 3-12, 1994. https://doi.org/10.1080/00222895.1994.9941655
- [7] B. Demes, K. J. Carlson, and T. M. Franz, “Cutting corners: The dynamics of turning behaviors in two primate species,” J. Exp. Biol., Vol.209, No.5, pp. 927-937, 2006. https://doi.org/10.1242/jeb.02046
- [8] R. J. Corbee, H. Maas, A. Doornenbal, and H. A. W. Hazewinkel, “Forelimb and hindlimb ground reaction forces of walking cats: Assessment and comparison with walking dogs,” Veterinary J., Vol.202, No.1, pp. 116-127, 2014. https://doi.org/10.1016/j.tvjl.2014.07.001
- [9] N. Gravish and G. V. Lauder, “Robotics-inspired biology,” J. Exp. Biol., Vol.221, No.7, Article No.jeb138438, 2018. https://doi.org/10.1242/jeb.138438
- [10] S. G. Larson and J. T. Stern, “Maintenance of above-branch balance during primate arboreal quadrupedalism: Coordinated use of forearm rotators and tail motion,” Am. J. Phys. Anthropol., Vol.129, No.1, pp. 71-81, 2006. https://doi.org/10.1002/ajpa.20236
- [11] S. H. Park, D. S. Kim, and Y. J. Lee, “Discontinuous spinning gait of a quadruped walking robot with waist-joint,” IEEE Int. Conf. Intell. Robots Syst., pp. 2744-2749, 2005. https://doi.org/10.1109/IROS.2005.1544956
- [12] C. Li, Q. Shi, Z. Gao, M. Ma, Q. Huang, H. Ishii, A. Takanishi, and T. Fukuda, “Bioinspired Phase-Shift Turning Action for a Biomimetic Robot,” IEEE/ASME Trans. on Mechatronics, Vol.25, No.1, pp. 84-94, 2020. https://doi.org/10.1109/TMECH.2019.2959375
- [13] B. Ugurlu, J. A. Saglia, N. G. Tsagarakis, and D. G. Caldwell, “Yaw moment compensation for bipedal robots via intrinsic angular momentum constraint,” Int. J. HR, Vol.9, No.4, Article No.1250033, 2012. https://doi.org/10.1142/S0219843612500326
- [14] P. D. Polly, “Limbs in Mammalian Evolution,” Brian K. Hall (Ed.), “Fins into Limbs: Evolution, Development, and Transformation,” University of Chicago Press, pp. 245-268, 2007.
- [15] M. Hildebrand, “Motions of the Running Cheetah and Horse,” J. Mammal., Vol.40, No.4, pp. 481-495, 1959. https://doi.org/10.2307/1376265
- [16] D. Owaki, T. Kano, K. Nagasawa, A. Tero, and A. Ishiguro, “Simple robot suggests physical interlimb communication is essential for quadruped walking,” J. R. Soc. Interface, Vol.10, No.78, Article No.20120669, 2013. https://doi.org/10.1098/rsif.2012.0669
- [17] B. J. Farrell, M. A. Bulgakova, I. N. Beloozerova, M. G. Sirota, and B. I. Prilutsky, “Body stability and muscle and motor cortex activity during walking with wide stance,” J. Neurophysiol., Vol.112, No.3, pp. 504-524, 2014. https://doi.org/10.1152/jn.00064.2014
- [18] A. Frigon, T. Akay, and B. I. Prilutsky, “Control of Mammalian Locomotion by Somatosensory Feedback,” Compr. Physiol., Vol.12, No.1, pp. 2877-2947, 2021. https://doi.org/10.1002/cphy.c210020
- [19] D. V. Lee, E. F. Stakebake, R. M. Walter, and D. R. Carrier, “Effects of mass distribution on the mechanics of level trotting in dogs,” J. Exp. Biol., Vol.207, No.10, pp. 1715-1728, 2004. https://doi.org/10.1242/jeb.00947
- [20] D. M. Henderson, “Burly gaits: Centers of mass, stability, and the trackways of sauropod dinosaurs,” J. Vertebr. Paleontol., Vol.26, No.4, pp. 907-921, 2006. https://doi.org/10.1671/0272-4634(2006)26[907:BGCOMS]2.0.CO;2
- [21] S. Ishigaki and Y. Matsumoto, ““Off-tracking”-like phenomenon observed in the turning sauropod trackway from the Upper Jurassic of Morocco,” Memoir of the Fukui Prefectural Dinosaur Museum, Vol.8, pp. 1-10, 2009.
- [22] L. Xing, D. Marty, K. Wang, M. G. Lockley, S. Chen, X. Xu, Y. Liu, H. Kuang, J. Zhang, H. Ran, and W. S. Persons, “An unusual sauropod turning trackway from the Early Cretaceous of Shandong Province, China,” Palaeogeogr. Palaeoclimatol. Palaeoecol., Vol.437, pp. 74-84, 2015. https://doi.org/10.1016/j.palaeo.2015.07.036
- [23] M. Cartmill, P. Lemelin, and D. Schmitt, “Support polygons and symmetrical gaits in mammals,” Zool. J. Linn., Vol.136, No.3, pp. 401-420, 2002. https://doi.org/10.1046/j.1096-3642.2002.00038.x
- [24] T. Sun, X. Xiong, Z. Dai, and P. Manoonpong, “Small-Sized Reconfigurable Quadruped Robot With Multiple Sensory Feedback for Studying Adaptive and Versatile Behaviors,” Front. Neurorobot., Vol.14, 2020. https://doi.org/10.3389/fnbot.2020.00014
- [25] S. Suzuki, T. Kano, A. J. Ijspeert, and A. Ishiguro, “Sprawling Quadruped Robot Driven by Decentralized Control With Cross-Coupled Sensory Feedback Between Legs and Trunk,” Front. Neurorobot., Vol.14, 2021. https://doi.org/10.3389/fnbot.2020.607455
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.