Paper:
Demonstration of Snow Removal Work by Wheel Loader in an Environment Surrounded by Obstacles
Hiroto Murayama*, Tomohito Kawabe*, Masahiro Inagawa*
 , Keiichi Yoshizawa*, Munehiro Ishibashi*, Toshinobu Takei**,†
, and Keiji Nagatani***
, Keiichi Yoshizawa*, Munehiro Ishibashi*, Toshinobu Takei**,†
, and Keiji Nagatani***
*Hirosaki University
3 Bunkyo-cho, Hirosaki-city, Aomori 036-8561, Japan
**Seikei University
3-3-1 Kichijoji, Kitamachi, Musashino-city, Tokyo 180-0001, Japan
†Corresponding author
***The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan

Snow removal work using construction equipment faces problems such as a shortage of skilled operators owing to the declining birthrate and aging population, work in dangerous areas, and accidents caused by a lack of concentration during long work hours. To improve the working environment, research and development of automation of construction equipment are actively conducted. Therefore, in this study, we aim to generate a driving path for wheel loaders for snow removal work in a work environment surrounded by obstacles, such as walls and fences. Furthermore, the proposed method considers the changing shape of the snow piles during the removal. We experimentally verified that snow removal could be performed using an actual wheel loader on the route generated by the proposed simulation.
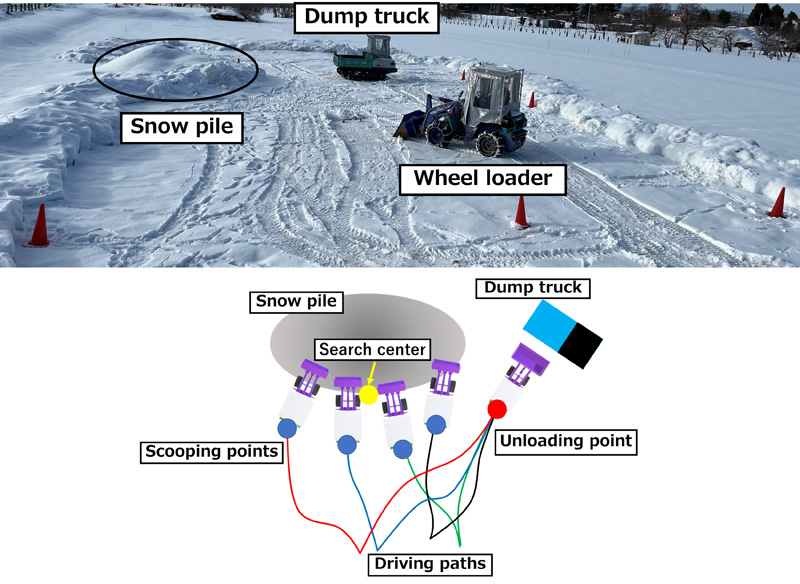
Autonomous snow removal work in the snow field
- [1] T. Kawabe, T. Takei, and E. Imanishi, “Path planning to expedite the complete transfer of distributed gravel piles with an automated wheel loader,” Advanced Robotics, Vol.35, No.23, pp. 1418-1437, 2021. https://doi.org/10.1080/01691864.2021.2008488
- [2] T. Fraichard and A. Scheuer, “From reeds and shepp’s to continuous-curvature paths,” IEEE Trans. on Robotics, Vol.20, No.6, pp. 1025-1035, 2004. https://doi.org/10.1109/TRO.2004.833789
- [3] Y. Konishi and H. Takahashi, “Autonomous Loading of Rocks by Use of Intelligent Loaders with a Vision System – A Concept of Autonomous Loading and Path Generation –,” Proc. of ISTVS1998, pp. 413-420, 1998. https://doi.org/10.1109/IROS.2015.7354219
- [4] T. Takei, K. Ichikawa, K. Okawa, S. Sarata, T. Tsubouchi, and A. Torige, “Path planning of wheel loader type robot for scooping and loading operation by genetic algorithm,” Proc. of ICCAS2013, pp. 1494-1499, 2013. https://doi.org/10.1109/ICCAS.2013.6704123
- [5] T. Takei, T. Hoshi, S. Sarata, and T. Tsubouchi, “Simultaneous determination of an optimal unloading point and paths between scooping points and the unloading point for a wheel loader,” Proc. of IROS2015, pp. 5923-5927, 2015. https://doi.org/10.1109/IROS.2015.7354219
- [6] B. Hong and X. Ma, “Path planning for wheel loaders: A discrete optimization approach,” 2017 IEEE 20th Int. Conf. on Intelligent Transportation Systems (ITSC), 2017. https://doi.org/10.1109/ITSC.2017.8317882
- [7] V. Nezhadali and L. Eriksson, “Wheel loader optimal transients in the short loading cycle,” IFAC Proc. Volumes, Vol.47, No.3, pp. 7917-7922, 2014. https://doi.org/10.3182/20140824-6-ZA-1003.02419
- [8] W. Ma, Y. Zhang, C. Liu, and S. Wang, “Prediction Method of the Fuel Consumption of Wheel Loaders in the V-Type Loading Cycle,” Mathematical Problems in Engineering, Vol.2015, Article No.538176, 2015. https://doi.org/10.1155/2015/538176
- [9] E. Halbach, A. Kolu, and R. Ghabcheloo, “Automated Pile Transfer Work Cycles with a Robotic Wheel Loader,” 17th Int. Conf. on Computing in Civil and Building Engineering (ICCCBE), 2018.
- [10] O. Kanai, H. Osumi, S. Sarata, and M. Kurisu, “Autonomous Scooping of a Rock Pile by a Wheel Loader Using Disturbance Observer,” Proc. of ISARC2006, pp. 472-475, 2006. https://doi.org/10.22260/ISARC2006/0089
- [11] H. Osumi, T. Uehara, N. Okada, T. Fujiwara, and S. Sarata, “Efficient Scooping of Rocks by Autonomous Controlled Wheel Loader,” J. Robot. Mechatron., Vol.24, No.6, pp. 924-932, 2012. https://doi.org/10.20965/jrm.2012.p0924
- [12] B. Cao, X. Liu, W. Chen, H. Li, and X. Wang, “Intelligentization of wheel loader shoveling system based on multi-source data acquisition,” Automation in Construction, Vol.147, Article No.104733, 2022. https://doi.org/10.1016/j.autcon.2022.104733
- [13] B. Frank, J. Kleinert, and R. Filla, “Optimal control of wheel loader actuators in gravel applications,” Automation in Construction, Vol.91, pp. 1-14, 2018. https://doi.org/10.1016/j.autcon.2018.03.005
- [14] S. Dadhich, F. Sandin, U. Bodin, U. Andersson, and T. Martinsson, “Field test of neural-network based automatic bucket-filling algorithm for wheel-loaders,” Automation in Construction, Vol.97, pp. 1-12, 2019. https://doi.org/10.1016/j.autcon.2018.10.013
- [15] S. Dadhich, F. Sandin, U. Bodin, U. Andersson, and T. Martinsson, “Adaptation of a wheel loader automatic bucket filling neural network using reinforcement learning,” 2020 Int. Joint Conf. on Neural Networks (IJCNN), pp. 1-9, 2020. https://doi.org/10.1109/IJCNN48605.2020.9206849
- [16] S. Sarata, N. Koyachi, T. Tsubouchi, H. Osumi, M. Kurisu, and K. Sugawara, “Development of Autonomous System for Loading Operation by Wheel Loader,” Proc. of the ISARC2006, pp. 466-471, 2006. https://doi.org/10.22260/ISARC2006/0088
- [17] S. Sarata, N. Koyachi, and K. Sugawara, “Measuring and update of shape of pile for loading operation by wheel loader,” Proc. of the ISARC2008, pp. 113-118, 2008. https://doi.org/10.22260/ISARC2008/0019
- [18] N. Koyachi and S. Sarata, “Path Planning and Path Following Control of an Autonomous Wheel Loader,” Proc. of JSME ICAM2010, pp. 699-704, 2010. https://doi.org/10.1299/jsmeicam.2010.5.699
- [19] M. Brand, M. Masuda, N. Wehner, and X.-H. Yu, “Ant colony optimization algorithm for robot path planning,” 2010 Int. Conf. on Computer Design and Applications, Vol.3, 2010. https://doi.org/10.1109/ICCDA.2010.5541300
- [20] T. Hoshi and T. Takei, “Simultaneous determination of optimized one unloading point and plural scooping points for wheel loader,” 2015 IEEE/SICE Int. Symposium on System Integration (SII), pp. 865-870, 2015. https://doi.org/10.1109/SII.2015.7405113
- [21] M. Inagawa, T. Kawabe, and T. Takei, “Demonstration of Localization for Construction Vehicles Using 3D LiDARs Installed in the Field,” J. of Field Robotics, 2023 (in press). https://doi.org/10.1002/rob.22211
- [22] Y. Hara, H. Kawata, A. Ohya, and S. Yuta, “Mobile robot localization and mapping by scan matching using laser reflection intensity of the sokuiki sensor,” Proc. of 32nd Annual Conf. on IEEE Industrial Electronics (IECON 2006), pp. 3018-3023, 2006. https://doi.org/10.1109/IECON.2006.347701
- [23] T. Kawabe, M. Inagawa, T. Takei, M. Ishibashi, and H. Murayama, “Demonstration of autonomous gravel piles transportation with retrofitted wheel loader,” Proc. of Annual Conf. of SICE System Integration Division (SI2022), 1A2-B14, 2022 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.