Paper:
Modeling and Optimization of an Arc-Shaped Sliding Locomotion Robot with Wobbling Mass
Cong Yan*
 , Longchuan Li**
, Wataru Yanagimoto***, Zhicheng Feng***, and Isao Tokuda***
, Longchuan Li**
, Wataru Yanagimoto***, Zhicheng Feng***, and Isao Tokuda***
*Graduate School of Advanced Science and Technology, Japan Advanced Institute of Science and Technology
1-1 Asahidai, Nomi, Ishikawa 923-1292, Japan
**College of Information Science and Technology, Beijing University of Chemical Technology
No.15, North 3rd Ring East Road, Chaoyang District, Beijing 100013, China
***Department of Mechanical Engineering, Ritsumeikan University
1-1-1 Nojihigashi, Kusatsu, Shiga 525-8577, Japan

Recently, several indirectly controlled sliding robots have been designed to achieve efficient and stable locomotion on slippery surfaces, and numerical simulations proved their possibility. However, it is difficult to achieve the same performance on a real machine because the wobbling mass, composed of springs and dampers, shows unexpected behavior when it is moved in translation. In this study, we propose a model of an arc-shaped sliding locomotion robot with a rotating wobbling mass. Specifically, the position of the center of gravity of the robot was changed, and the pull-in phenomenon due to the rotational motion of the wobbling mass is utilized. By rotating the wobbling mass, the sliding motion is realized while maintaining a strong propulsive force. First, we performed experimental validation of the proposed new mechanism. Subsequently, a detailed mathematical model was constructed for numerical analysis. Finally, the motion performance was optimized by the Bayesian optimization method.
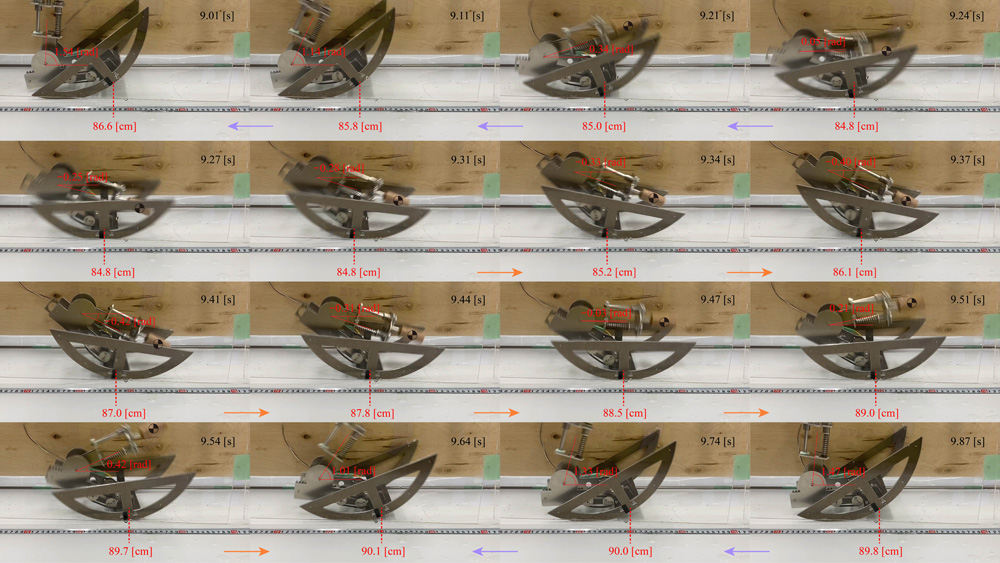
Motion generation of arc-shaped sliding locomotion robot with wobbling mass
- [1] J. Buchli, M. Kalakrishnan, M. Mistry, P. Pastor, and S. Schaal, “Compliant quadruped locomotion over rough terrain,” 2009 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 814-820, 2009. https://doi.org/10.1109/IROS.2009.5354681
- [2] Y. Ishigaki and K. Ito, “Proposal for semiautonomous centipede-like robot for rubble—development of an actual scale robot and validation of its mobility,” Proc. of the 2014 Int. Conf. on Advanced Mechatronic Systems, pp. 409-414, 2014. https://doi.org/10.1109/ICAMechS.2014.6911580
- [3] K. A. Saar, F. Giardina, and F. Iida, “Model-free design optimization of a hopping robot and its comparison with a human designer,” IEEE Robotics and Automation Letters, Vol.3, No.2, pp. 1245-1251, 2018. https://doi.org/10.1109/LRA.2018.2795646
- [4] R. B. McGhee and G. I. Iswandhi, “Adaptive locomotion of a multilegged robot over rough terrain,” IEEE Trans. on Systems, Man, and Cybernetics, Vol.9, No.4, pp. 176-182, 1979. https://doi.org/10.1109/TSMC.1979.4310180
- [5] J. H. Park and O. Kwon, “Reflex control of biped robot locomotion on a slippery surface,” Proc. of IEEE Int. Conf. on Robotics and Automation (ICRA 2001), Vol.4, pp. 4134-4139, 2001. https://doi.org/10.1109/ROBOT.2001.933264
- [6] F. Jenelten, J. Hwangbo, F. Tresoldi, C. D. Bellicoso, and M. Hutter, “Dynamic locomotion on slippery ground,” IEEE Robotics and Automation Letters, Vol.4, No.4, pp. 4170-4176, 2019. https://doi.org/10.1109/LRA.2019.2931284
- [7] S. Kajita, K. Kaneko, K. Harada, F. Kanehiro, K. Fujiwara, and H. Hirukawa, “Biped walking on a low friction floor,” 2004 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Vol.4, pp. 3546-3552, 2004. https://doi.org/10.1109/IROS.2004.1389965
- [8] F. Günther, F. Giardina, and F. Iida, “Self-stable one-legged hopping using a curved foot,” 2014 IEEE Int. Conf. on Robotics and Automation, pp. 5133-5138, 2014. https://doi.org/10.1109/ICRA.2014.6907612
- [9] F. Giardina and F. Iida, “Efficient and stable locomotion for impulse-actuated robots using strictly convex foot shapes,” IEEE Trans. on Robotics, Vol.34, No.3, pp. 674-685, 2018. https://doi.org/10.1109/TRO.2018.2813359
- [10] Y. Hanazawa, T. Hayashi, M. Yamakita, and F. Asano, “High-speed limit cycle walking for biped robots using active up-and-down motion control of wobbling mass,” 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3649-3654, 2013. https://doi.org/10.1109/IROS.2013.6696877
- [11] F. Asano, T. Seino, I. Tokuda, and Y. Harata, “A novel locomotion robot that slides and rotates on slippery downhill,” 2016 IEEE Int. Conf. on Advanced Intelligent Mechatronics, pp. 425-430, 2016. https://doi.org/10.1109/AIM.2016.7576804
- [12] M. Nishihara, T. Seino, and F. Asano, “Motion analysis of underactuated locomotion robot with quick return linkages on slippery level surface,” 2017 IEEE Int. Conf. on Advanced Intelligent Mechatronics, pp. 1663-1668, 2017. https://doi.org/10.1109/AIM.2017.8014257
- [13] L. Li, F. Asano, and I. Tokuda, “Nonlinear analysis of an indirectly controlled sliding locomotion robot,” 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1-9, 2018. https://doi.org/10.1109/IROS.2018.8593401
- [14] L. Li, F. Asano, and I. Tokuda, “High-speed sliding locomotion generation on slippery surface of an indirectly controlled robot with viscoelastic body,” IEEE Robotics and Automation Letters, Vol.4, No.3, pp. 2950-2957, 2019. https://doi.org/10.1109/LRA.2019.2924132
- [15] L. Guo, F. Asano, and L. Li, “Development of experimental paper-feeding system using crawling-like locomotion robot,” Proc. of the 23rd issue of the Int. Conf. Series on Climbing and Walking Robots and the Support Technologies for Mobile Machines, pp. 193-194, 2020. https://doi.org/10.13180/clawar.2020.24-26.08.35
- [16] K. A. Saar, A. Rosendo, and F. Llda, “Bayesian optimization of gaits on a bipedal slip model,” 2017 IEEE Int. Conf. on Robotics and Biomimetics, pp. 1812-1817, 2017. https://doi.org/10.1109/ROBIO.2017.8324681
- [17] I. Roman, R. Santana, A. Mendiburu, and J. A. Lozano, “An experimental study in adaptive kernel selection for bayesian optimization,” IEEE Access, Vol.7, pp. 184294-184302, 2019. https://doi.org/10.1109/ACCESS.2019.2960498
- [18] S. Greenhill, S. Rana, S. Gupta, P. Vellanki, and S. Venkatesh, “Bayesian optimization for adaptive experimental design: a review,” IEEE Access, Vol.8, pp. 13937-13948, 2020. https://doi.org/10.1109/ACCESS.2020.2966228
- [19] L. Li, S. Ma, I. Tokuda, F. Asano, M. Nokata, Y. Tian, and L. Du, “Generation of efficient rectilinear gait based on dynamic morphological computation and its theoretical analysis,” IEEE Robotics and Automation Letters, Vol.6, No.2, pp. 841-848, 2021. https://doi.org/10.1109/LRA.2021.3052421
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.