Paper:
A Two-Step Fire Blanket Release Mechanism for Unmanned Aerial Vehicles
Photchara Ratsamee*1
 , Thanarat Hanwong*2, Harn Sison*3
, and Kaned Thungod*4,*5,†
, Thanarat Hanwong*2, Harn Sison*3
, and Kaned Thungod*4,*5,†
*1Faculty of Robotics and Design, Osaka Institute of Technology
1-45 Chayamachi, Kita-ku, Osaka 530-8568, Japan
*2Metro Corporation
5-12-8 Nishinakajima, Yodogawa-ku, Osaka 532-0011, Japan
*3Graduate School of Information Science and Technology, Osaka University
1-32 Machikaneyama, Toyonaka, Osaka 560-0043, Japan
*4Mechatronics Research Unit, Faculty of Engineering, Mahasarakham University
41/20 Khamriang, Kantarawichai, Mahasarakham 44150, Thailand
*5Smart Process Design and Automation Unit, Mahasarakham University
41/20 Khamriang, Kantarawichai, Mahasarakham 44150, Thailand
†Corresponding author

Using fire blankets is one effective option for fire extinguishing. This paper proposes a two-step release mechanism for unmanned aerial vehicles (UAVs) that can precisely drop a blanket onto a target location using the advantage of wind load, avoiding the ground effect. We analyzed wind velocity under the UAV body to find the optimized range that maximizes the release of the fire blanket. Afterwards, we tested the performance of our proposed system in an indoor environment with simulated wind disturbance. Our experiment results showed that the system is robust against wind disturbance at 3.5 m/s. Finally, we tested our system with UAVs in an outdoor environment with different heights and proved the effectiveness of the system for up to 4 m height in an outdoor environment.
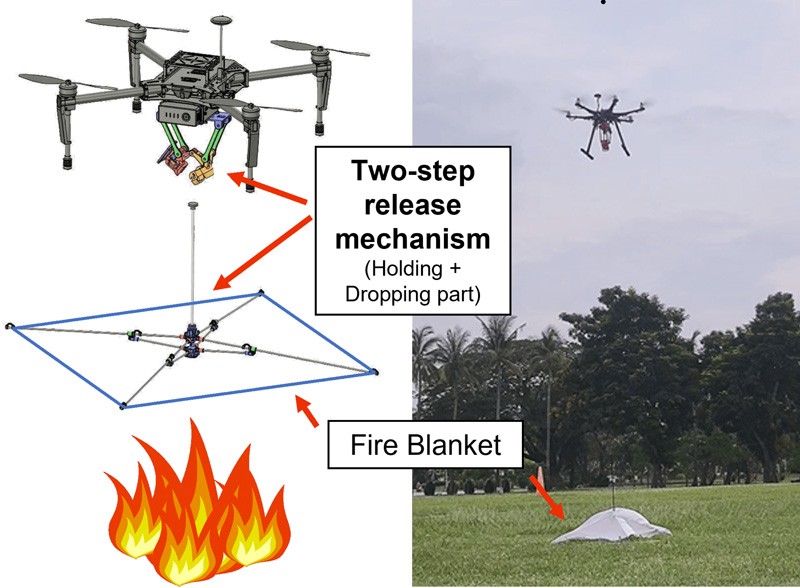
Two-step releasing mechanism equipped on UAV
- [1] K. Frank, N. Gravestock, M. Spearpoint, and C. Fleischmann, “A review of sprinkler system effectiveness studies,” Fire Science Reviews, Vol.2, No.1, Article No.6, 2013. https://doi.org/10.1186/2193-0414-2-6
- [2] J. Zhou, C. Tu, and G. Reniers, “Simulation analysis of fire truck scheduling strategies for fighting oil fires,” J. of Loss Prevention in the Process Industries, Vol.67, Article No.104205, 2020. https://doi.org/10.1016/j.jlp.2020.104205
- [3] C. Yuan, Z. Liu, and Y. Zhang, “UAV-based forest fire detection and tracking using image processing techniques,” 2015 Int. Conf. on Unmanned Aircraft Systems (ICUAS), pp. 639-643, 2015. https://doi.org/10.1109/ICUAS.2015.7152345
- [4] S. M. Lee, J. L. Chien, E. Tang, D. Lee, J. Liu, R. Lim, and S. Foong, “Hybrid kinematics modelling for an aerial robot with visual controllable fluid ejection,” 2020 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), pp. 832-838, 2020. https://doi.org/10.1109/AIM43001.2020.9158941
- [5] H. Ando, Y. Ambe, T. Yamaguchi, M. Konyo, K. Tadakuma, S. Maruyama, and S. Tadokoro, “Fire fighting tactics with aerial hose-type robot “dragon firefighter”,” 2019 IEEE Int. Conf. on Advanced Robotics and its Social Impacts (ARSO), pp. 291-297, 2019. https://doi.org/10.1109/ARSO46408.2019.8948716
- [6] A. M. S. Soliman, S. C. Cagan, and B. B. Buldum, “The design of a rotary-wing unmanned aerial vehicles–payload drop mechanism for fire-fighting services using fire-extinguishing balls,” SN Applied Sciences, Vol.1, No.10, Article No.1259, 2019. https://doi.org/10.1007/s42452-019-1322-6
- [7] N. R. N. Zadeh, A. H. Abdulwakil, M. J. R. Amar, B. Durante, and C. V. N. R. Santos, “Fire-fighting uav with shooting mechanism of fire extinguishing ball for smart city,” Indonesian J. of Electrical Engineering and Computer Science, Vol.22, No.3, pp. 1320-1326, 2021. http://doi.org/10.11591/ijeecs.v22.i3.pp1320-1326
- [8] M. Zhao, T. Anzai, F. Shi, T. Maki, T. Nishio, K. Ito, N. Kuromiya, K. Okada, and M. Inaba, “Versatile multilinked aerial robot with tilted propellers: Design, modeling, control, and state estimation for autonomous flight and manipulation,” J. of Field Robotics, Vol.38, No.7, pp. 933-966, 2021. https://doi.org/10.1002/rob.22019
- [9] A. Masuda, A. Tanaka, Y. Higashi, and N. Miura, “Reliable activation of an epm-based clinging device for aerial inspection robots,” J. Robot. Mechatron., Vol.31, No.6, pp. 827-836, 2019. https://doi.org/10.20965/jrm.2019.p0827
- [10] R. Ladig, H. Paul, R. Miyazaki, and K. Shimonomura, “Aerial manipulation using multirotor uav: A review from the aspect of operating space and force,” J. Robot. Mechatron., Vol.33, No.2, pp. 196-204, 2021. https://doi.org/10.20965/jrm.2021.p0196
- [11] B. R. Ellingwood and P. B. Tekie, “Wind load statistics for probability-based structural design,” J. of Structural Engineering, Vol.125, No.4, pp. 453-463, 1999. https://doi.org/10.1061/(ASCE)0733-9445(1999)125:4(453)
- [12] C. Powers, D. Mellinger, A. Kushleyev, B. Kothmann, and V. Kumar, “Influence of aerodynamics and proximity effects in quadrotor flight,” J. P. Desai, G. Dudek, O. Khatib, and V. Kumar (Eds.), “Experimental Robotics,” Springer, pp. 289-302, 2013.
- [13] Y. Li, K. Yonezawa, and H. Liu, “Effect of ducted multi-propeller configuration on aerodynamic performance in quadrotor drone,” Drones, Vol.5, No.3, Article No.101, 2021. https://doi.org/10.3390/drones5030101
- [14] R. Broglia, G. Dubbioso, D. Durante, and A. D. Mascio, “Simulation of turning circle by cfd: analysis of different propeller models and their effect on maneuvering prediction,” Applied Ocean Research, Vol.39, pp. 1-10, 2013. https://doi.org/10.1016/j.apor.2012.09.001
- [15] F. Mazhar, A. M. Khan, I. A. Chaudhry, and M. Ahsan, “On using neural networks in uav structural design for cfd data fitting and classification,” Aerospace Science and Technology, Vol.30, No.1, pp. 210-225, 2013. https://doi.org/10.1016/j.ast.2013.08.005
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.