Review:
Biomolecular Motor-Based Swarm Robot: An Innovation in Molecular Delivery
Mousumi Akter*
 and Akira Kakugo**
and Akira Kakugo**
*Institute of Molecular Biology, University of Oregon
1229 University of Oregon, 1318 Franklin Blvd, Eugene 97403, USA
**Department of Physics, Graduate School of Science, Kyoto University
Kitashirakawa Oiwake-cho, Sakyo-ku, Kyoto 606-8502, Japan

Biomolecular motor-based micro-sized robots have recently created an innovation in the field of science and technology as molecular transporters. Groups of these tiny robots can work substantially better than individual ones in terms of the transported distance and number or size of cargo. Site-specific molecular delivery, the main feature of these robots, has helped to improve the workability of robots in a more controllable manner.
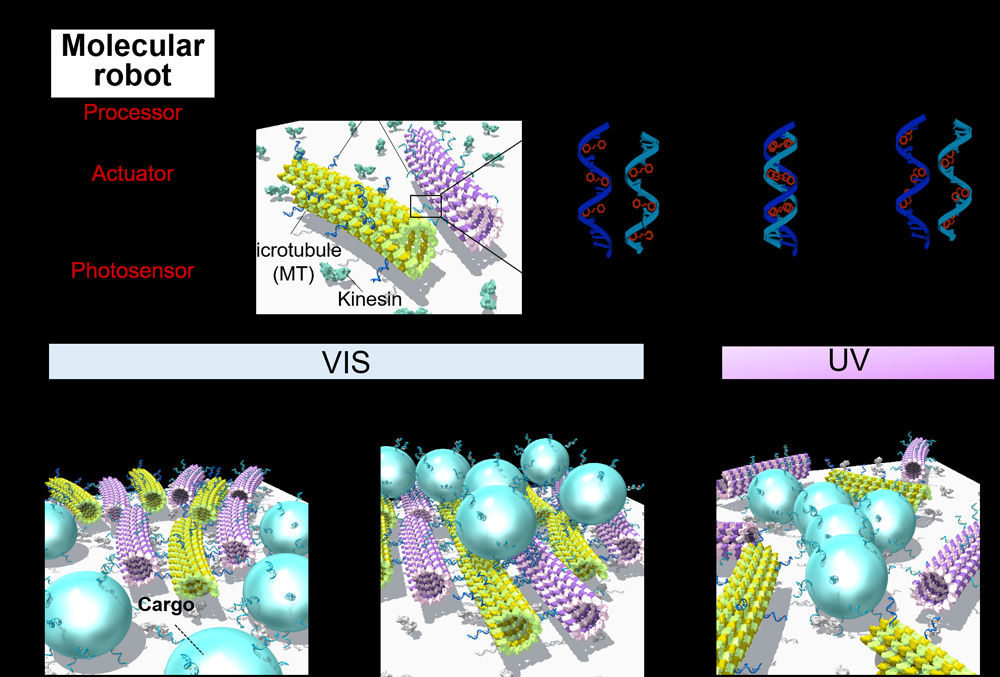
Construction of micro-sized molecular swarm robots for cargo transportation
- [1] S. Bahar, “Flocking, Swarming, and Communicating,” in “The Essential Tension,” The Frontiers Collection, Springer, Dordrecht, pp. 127-152, 2018. https://doi.org/10.1007/978-94-024-1054-9_8
- [2] M. Rubenstein, A. Cornejo, and R. Nagpal, “Programmable self-assembly in a thousand-robot swarm,” Science, Vol.345, pp. 795-799, 2014. https://doi.org/10.1126/science.1254295
- [3] R. Vicerra, E. Dadios, A. Bandala, and L. Lim, “Swarm Robot System for Underwater Communication Network,” J. Adv. Comput. Intell. Intell. Inform., Vol.18, No.5, pp. 769-775, 2014. https://doi.org/10.20965/jaciii.2014.p0769
- [4] M. Schranz, M. Umlauft, M. Sende, and W. Elmenreich, “Swarm Robotic Behaviors and Current Applications,” Front. Robot. AI, Vol.7, Article No.36, 2020. https://doi.org/10.3389/frobt.2020.00036
- [5] J. Katuri, W. E. Uspal, M. N. Popescu, and S. Sánchez, “Inferring non-equilibrium interactions from tracer response near confined active Janus particles,” Sci. Adv., Vol.7, No.18, 2021. https://doi.org/10.1126/sciadv.abd0719
- [6] P. Grančič and F. Štěpánek, “Swarming behavior of gradient-responsive colloids with chemical signaling,” J. of Physical Chemistry B., Vol.117, No.26, pp. 8031-8038, 2013. https://doi.org/10.1021/jp400234n
- [7] B. Dai, J. Wang, Z. Xiong, X. Zhan, W. Dai, C.-C. Li, S.-P. Feng, and J. Tang, “Programmable artificial phototactic microswimmer,” Nat. Nanotechnol., Vol.11, pp. 1087-1092, 2016. https://doi.org/10.1038/nnano.2016.187
- [8] T. Vicsek, “Swarming microtubules,” Nature, Vol.483, pp. 411-412, 2012. https://doi.org/10.1038/483411a
- [9] M. Akter, J. J. Keya, A. M. R. Kabir, H. Asanuma, K. Murayama, K. Sada, and A. Kakugo, “Photo-regulated trajectories of gliding microtubules conjugated with DNA,” Chem. Comm., Vol.57, pp. 7953-7956, 2020. https://doi.org/10.1039/D0CC03124K
- [10] J. J. Keya, R. Suzuki, A. M. R. Kabir, D. Inoue, H. Asanuma, K. Sada, H. Hess, A. Kuzuya, and A. Kakugo, “DNA-assisted swarm control in a biomolecular motor system,” Nat. Commun., Vol.9, Article No.453, 2018. https://doi.org/10.1038/s41467-017-02778-5
- [11] J. J. Keya, A. M. R. Kabir, D. Inoue, K. Sada, H. Hess, A. Kuzuya, and A. Kakugo, “Control of swarming of molecular robots,” Sci. Rep., Vol.8, Article No.11756, 2018. https://doi.org/10.1038/s41598-018-30187-1
- [12] M. Akter, J. J. Keya, K. Kayano, A. M. R. Kabir, D. Inoue, H. Hess, K. Sada, A. Kuzuya, H. Asanuma, and A. Kakugo, “Cooperative cargo transportation by a swarm of molecular machines,” Sci. Robot., Vol.7, Article No.eabm0677, 2022. https://doi.org/10.1126/scirobotics.abm0677
- [13] H. Hess and G. D. Bachand, “Biomolecular motors,” Materials Today, Vol.8, No.12, pp. 22-29, 2005. https://doi.org/10.1016/S1369-7021(05)71286-4
- [14] H. Hess, “Engineering applications of biomolecular motors,” Annu. Rev. Biomed. Eng., Vol.13, pp. 429-450, 2011. https://doi.org/10.1146/annurev-bioeng-071910-124644
- [15] S. Hamada, “Molecular Robotics,” M. H. Ang, O. Khatib, and B. Siciliano (Eds.), “Encyclopedia of Robotics,” Springer, Berlin, Heidelberg, 2021. https://doi.org/10.1007/978-3-642-41610-1_189-1
- [16] Y. Sato, Y. Hiratsuka, I. Kawamata, S. Murata, and S. I. M. Nomura, “Micrometer-sized molecular robot changes its shape in response to signal molecules,” Sci. Robot., Vol.2, No.4, Artcle No.ieaal3735, 2017. https://doi.org/10.1126/scirobotics.aal3735
- [17] H. Asanuma, X. Liang, H. Nishioka, D. Matsunaga, M. Liu, and M. Komiyama, “Synthesis of azobenzene-tethered DNA for reversible photo-regulation of DNA functions: hybridization and transcription,” Nat. Protoc., Vol.2, No.1, pp. 203-212, 2007. https://doi.org/10.1038/nprot.2006.465
- [18] M. R. Rashid, C. Ganser, M. Akter, S. R. Nasrin, A. M. R. Kabir, K. Sada, T. Uchihashi, and A. Kakugo, “3D structure of ring-shaped microtubule swarms revealed by high-speed atomic force microscopy,” Chem. Lett., Vol.52, No.2, pp. 100-104, 2023. https://doi.org/10.1246/cl.220491
- [19] S. M. Früh, D. Steuerwald, U. Simon, and V. Vogel, “Covalent cargo loading to molecular shuttles via copper-free “click chemistry”,” Biomacromolecules, Vol.13, No.2, pp. 3908-3911, 2012. https://doi.org/10.1021/bm301437c
- [20] B. Nitzsche, F. Ruhnow, and S. Diez, “Quantum-dot-assisted characterization of microtubule rotations during cargo transport,” Nat. Nanotechnol., Vol.3, pp. 552-556, 2008. https://doi.org/10.1038/nnano.2008.216
- [21] C. Brunner, C. Wahnes, and V. Vogel, “Cargo pick-up from engineered loading stations by kinesin driven molecular shuttles,” Lab on a Chip, Vol.7, No.10, pp. 1263-1271, 2007. https://doi.org/10.1039/B707301A
- [22] Y. Yang and M. A. Bevan, “Cargo capture and transport by colloidal swarms,” Sci Adv., Vol.6, No.4, Article No.eaay7679, 2020. https://doi.org/10.1126/sciadv.aay7679
- [23] T. Yasuda and K. Ohkura, “Sharing Experience for Behavior Generation of Real Swarm Robot Systems Using Deep Reinforcement Learning,” J. Robot. Mechatron., Vol.31, No.4, pp. 520-525, 2019. https://doi.org/10.20965/jrm.2019.p0520
- [24] Z. Zou, Y. Liu, Y.-N. Young, O. S. Pak, and A. C. H. Tsang, “Gait switching and targeted navigation of microswimmers via deep reinforcement learning,” Commun. Phys., Vol.5, Article No.158, 2022. https://doi.org/10.1038/s42005-022-00935-x
- [25] T. Lymburn, S. D. Algar, M. Small, and T. Jüngling, “Reservoir computing with swarms,” Chaos: An Interdisciplinary J. of Nonlinear Science, Vol.31, No.3, Article No.033121, 2021. https://doi.org/10.1063/5.0039745
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.