Paper:
Experimental Analysis of Shepherding-Type Robot Navigation Utilizing Sound-Obstacle-Interaction
Yusuke Tsunoda
 , Le Trong Nghia, Yuichiro Sueoka
, and Koichi Osuka
, Le Trong Nghia, Yuichiro Sueoka
, and Koichi Osuka
Department of Mechanical Engineering, Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan

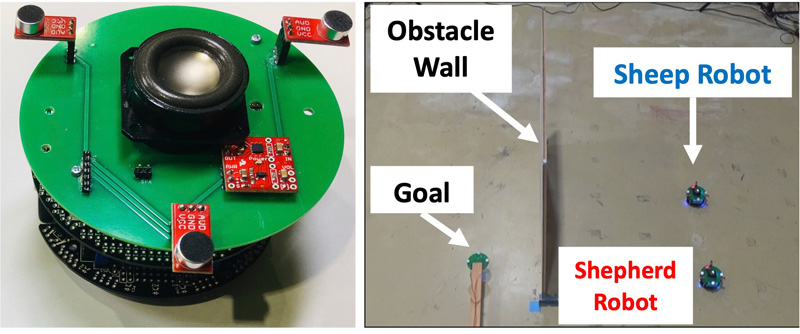
This study considers a simple robot swarm navigation system based on shepherding in an environment with obstacles. Shepherding is a system in which a small number of control agents (shepherds and sheepdogs) indirectly guide several robots (sheep) by driving them from behind. Previous studies have predominantly focused on verifying proposed controllers based on numerical simulations and navigation experiments in well-prepared environments. However, additional shepherding experiments need to be conducted in environments with obstacles. This study aims to facilitate shepherding-type swarm robot navigation in an environment where a wall obstructs the goal. Usually, a high-end controller design is adopted for the robot to prevent it from getting trapped by obstacles. However, as the environment becomes more complex, the system design may become difficult. In contrast, this study proposes a simple shepherding navigation system based on creating and controlling “fields” to avoid obstacles. This research aims to verify whether the robot can be guided to a goal without obstacle recognition by creating an acoustic field based on the diffraction effects of sound. The proposed method modifies the previous shepherding models for sheep and shepherd robots to make them behave according to the acoustic field gradient. We demonstrate the validity of the proposed system by performing robot navigation for dog and sheep robots.
Shepherding-type robot navigation utilizing sound-obstacle-interaction
- [1] T. J. Chong, X. J. Tang, C. H. Leng, M. Yogeswaran, O. E. Ng, and Y. Z. Chong, “Sensor technologies and simultaneous localization and mapping (slam),” Procedia Computer Science, Vol.76, pp. 174-179, 2015. https://doi.org/10.1016/j.procs.2015.12.336
- [2] F. B. P. Malavazi, R. Guyonneau, J.-B. Fasquel, S. Lagrange, and F. Mercier, “Lidar-only based navigation algorithm for an autonomous agricultural robot,” Computers and Electronics in Agriculture, Vol.154, pp. 71-79, 2018. https://doi.org/10.1016/j.compag.2018.08.034
- [3] H. Durrant-Whyte and T. Bailey, “Simultaneous localization and mapping: part i,” IEEE Robotics & Automation Magazine, Vol.13, No.2, pp. 99-110, 2006. https://doi.org/10.1109/MRA.2006.1638022
- [4] N. Atanasov, J. L. Ny, K. Daniilidis, and G. J. Pappas, “Decentralized active information acquisition: Theory and application to multi-robot slam,” 2015 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 4775-4782, 2015. https://doi.org/10.1109/ICRA.2015.7139863
- [5] N. K. Long, K. Sammut, D. Sgarioto, M. Garratt, and H. A. Abbass, “A comprehensive review of shepherding as a bio-inspired swarm-robotics guidance approach,” IEEE Trans. on Emerging Topics in Computational Intelligence, Vol.4, No.4, pp. 523-537, 2020. https://doi.org/10.1109/TETCI.2020.2992778
- [6] P. Nalepka, R. W. Kallen, A. Chemero, E. Saltzman, and M. J. Richardson, “Herd those sheep: Emergent multiagent coordination and behavioral-mode switching,” Psychological Science, Vol.28, No.5, pp. 630-650, 2017. https://doi.org/10.1177/0956797617692107
- [7] A. A. Paranjape, S.-J. Chung, K. Kim, and D. H. Shim, “Robotic herding of a flock of birds using an unmanned aerial vehicle,” IEEE Trans. on Robotics, Vol.34, No.4, pp. 901-915, 2018. https://doi.org/10.1109/TRO.2018.2853610
- [8] R. Vaughan, N. Sumpter, J. Henderson, A. Frost, and S. Cameron, “Experiments in automatic flock control,” Robotics and Autonomous Systems, Vol.31, No.1-2, pp. 109-117, 2000. https://doi.org/10.1016/S0921-8890(99)00084-6
- [9] L. Gómez-Nava, R. Bon, and F. Peruani, “Intermittent collective motion in sheep results from alternating the role of leader and follower,” Nature Physics, Vol.18, pp. 1494-1501, 2022. https://doi.org/10.1038/s41567-022-01769-8
- [10] W. Lee and D. Kim, “Autonomous shepherding behaviors of multiple target steering robots,” Sensors, Vol.17, No.12, Article No.2729, 2017. https://doi.org/10.3390/s17122729
- [11] A. Pierson and M. Schwager, “Controlling noncooperative herds with robotic herders,” IEEE Trans. on Robotics, Vol.34, No.2, pp. 517-525, 2017. https://doi.org/10.1109/TRO.2017.2776308
- [12] R. Himo, M. Ogura, and N. Wakamiya, “Iterative shepherding control for agents with heterogeneous responsivity,” Mathematical Biosciences and Engineering, Vol.19, No.4, pp. 3509-3525, 2022. https://doi.org/10.3934/mbe.2022162
- [13] A. Fujioka, M. Ogura, and N. Wakamiya, “Shepherding algorithm for heterogeneous flock with model-based discrimination,” Advanced Robotics, Vol.37, No.1-2, pp. 99-114, 2022. https://doi.org/10.1080/01691864.2022.2133552
- [14] Y. Sueoka, M. Ishitani, and K. Osuka, “Analysis of sheepdog-type robot navigation for goal-lost-situation,” Robotics, Vol.7, No.2, Article No.21, 2018. https://doi.org/10.3390/robotics7020021
- [15] Y. Tsunoda, Y. Sueoka, T. Wada, and K. Osuka, “Sheepdog-type robot navigation: Experimental verification based on a linear model,” 2020 IEEE/SICE Int. Symposium on System Integration (SII), pp. 1144-1149, 2020. https://doi.org/10.1109/SII46433.2020.9026218
- [16] Y. Tsunoda, Y. Sueoka, T. Wada, and K. Osuka, “Design of mobile control for multiple agents inspired by sheepdog shepherding and its verification,” Trans. of the Institute of Systems, Control and Information Engineers, Vol.34, No.7, pp. 191-198, 2021 (in Japanese). https://doi.org/10.5687/iscie.34.191
- [17] Y. Tsunoda, Y. Sueoka, and K. Osuka, “Experimental analysis of acoustic field control-based robot navigation,” J. Robot. Mechatron., Vol.31, No.1, pp. 110-117, 2019. https://doi.org/10.20965/jrm.2019.p0110
- [18] T. Kida, Y. Sueoka, H. Shigeyoshi, Y. Tsunoda, Y. Sugimoto, and K. Osuka, “Verification of acoustic-wave-oriented simple state estimation and application to swarm navigation,” J. Robot. Mechatron., Vol.33, No.1, pp. 119-128, 2021. https://doi.org/10.20965/jrm.2021.p0119
- [19] Y. Sueoka, D. D. Khanh, Y. Tsunoda, Y. Sugimoto, and K. Osuka, “Analysis and experiment of robot navigation by sound field using interaction with obstacles,” Trans. of the JSME, Vol.87, No.896, Article No.20-00280, 2021 (in Japanese). https://doi.org/10.1299/transjsme.20-00280
- [20] Y. Tsunoda, Y. Sueoka, and K. Osuka, “On statistical analysis for shepherd guidance system,” 2017 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), pp. 1246-1251, 2017. https://doi.org/10.1109/ROBIO.2017.8324588
- [21] Y. Tsunoda, Y. Sueoka, Y. Sato, and K. Osuka, “Analysis of local-camera-based shepherding navigation,” Advanced Robotics, Vol.32, No.23, pp. 1217-1228, 2018. https://doi.org/10.1080/01691864.2018.1539410
- [22] Y. Tsunoda, Y. Sueoka, T. Wada, and K. Osuka, “Theoretical analysis of mobile control method for group agents motivated by sheepdog shepherding,” Trans. of the Society of Instrument and Control Engineers, Vol.55, No.8, pp. 507-515, 2019 (in Japanese). https://doi.org/10.9746/sicetr.55.507
- [23] Y. Tsunoda, M. Ishitani, Y. Sueoka, and K. Osuka, “Analysis of sheepdog-type navigation for minimal sheep model,” The 3rd Int. Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2019), pp. 197-200, 2019.
- [24] Y. Tsunoda, M. Ishitani, Y. Sueoka, and K. Osuka, “Analysis of sheepdog-type navigation for a sheep model with dynamics,” The Twenty-Fourth Int. Symposium on Artificial Life and Robotics 2019 (AROB 24th 2019), pp. 499-503, 2019.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.