Paper:
Indoor Positioning Scheme Using Off-the-Shelf Lighting Fixtures’ Fingerprints
Hiroyuki Kobayashi
Osaka Institute of Technology
1-45 Chayamachi, Kita-ku, Osaka, Osaka 530-8568, Japan

This paper discusses an indoor positioning technique aimed at human-centric services such as pedestrian navigation or service robots. The method is called “CEPHEID” and uses a light flickering pattern as an environmental fingerprint. The authors found that each lighting fixture has unique and distinguishable flickering characteristics. In this paper, CEPHEID is introduced as a “classifier” and its validity is shown based on experimental results. Additionally, an approach for improving the positional precision is proposed. The classifier and regressor are combined to create a zone-classified regressor model for CEPHEID. The basic performance of this concept is also tested using an experiment.
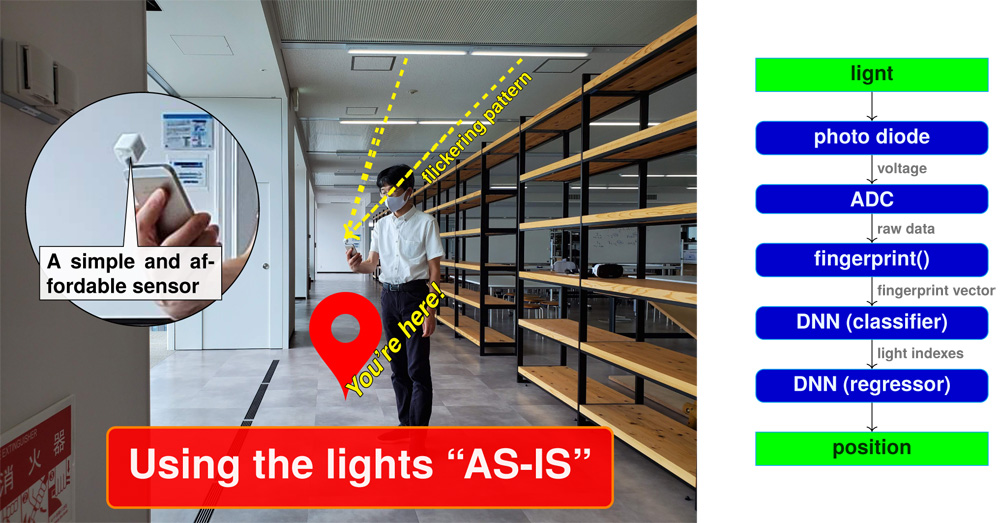
The positioning using flickering fingerprints
- [1] R. Siegwart, I. R. Nourbakhsh, and D. Scaramuzza, “Introduction to Autonomous Mobile Robots 2nd edition,” The MIT Press, 2011.
- [2] S. Thrun, W. Burgard, and D. Fox, “Probabilistic ROBOTICS,” The MIT Press, 2005.
- [3] G. Dudek and M. Jenkin, “Computational Principles of Mobile Robotics,” Cambridge University Press, 2000.
- [4] H. Kobayashi, “A no-code and custom-made indoor positioning service by using lighting fixtures,” Proc. of the 22nd SICE System Integration Division Annual Conf., pp. 257-2578, 2021 (in Japanese).
- [5] H. Kobayashi, “Cepheid: An environment lighting classification technique for indoor localization,” Trans. of the Society of Instrument and Control Engineering, Vol.57, No.1, pp. 2-10, 2021 (in Japanese). https://doi.org/10.9746/sicetr.57.2
- [6] H. Kobayashi, “Cepheid: the lighting fixture identification technique for indoor localization using deep learning,” Proc. of the 20th SICE System Integration Division Annual Conf., 2019 (in Japanese).
- [7] H. Kobayashi, “Cepheid: the infrastructure-less indoor localization using lighting fixtures’ acoustic frequency fingerprints,” Proc. of the 45th Annual Conf. of the IEEE Industrial Electronics Society (IECON2019), pp. 6842-6847, 2019. https://doi.org/10.1109/IECON.2019.8927659
- [8] R. Yamano and H. Kobayashi, “A study on self-localization method based on individual difference of frequency component of illumination light,” Proc. of the 18th SICE System Integration Division Annual Conf., pp. 3307-3309, 2017 (in Japanese).
- [9] N. Akai, S. A. Rahok, K. Katayose, R. Shimada, K. Inoue, and K. Ozaki, “Implementation of magnetic navigation method based on experimental analysis of magnetic field,” J. of the Robotics Society of Japan, Vol.32, No.4, 2014 (in Japanese).
- [10] J. Rekimoto, A. Shinozaki, T. Sueyoshi, and T. Miyaki, “Placeengine: a wifi location platform based on realworld folksonomy,” Proc. of the Internet Conf. 2006, pp. 95-104, 2006 (in Japanese).
- [11] C. Zhang and X. Zhang, “Litell: Robust indoor localization using unmodified light fixtures,” Proc. of the 22nd Annual Int. Conf. on Mobile Computing and Networking (MobiCom ’16), pp. 230-242, New York, NY, USA, 2016. https://doi.org/10.1145/2973750.2973767
- [12] T. Noguchi, H. Makino, K. Takagi, T. Ueda, and Y. Suzuki, “Kenkyu saishin gps & indoa sokui,” Interface, pp. 66-105, 2013 (in Japanese).
- [13] C. E. Galván-Tejada, J. P. García-Vázquez, J. I. Galván-Tejada, J. R. Delgado-Contreras, and R. F. Brena, “Infrastructure-less indoor localization using the microphone, magnetometer and light sensor of a smartphone,” Sensors, Vol.15, No.8, pp. 20355-20372, 2015. https://doi.org/10.3390/s150820355
- [14] S. Park and S. Hashimoto, “Indoor localization for autonomous mobile robot based on passive rfid,” Proc. of the 2008 IEEE Int. Conf. on Robotics and Biomimetics, pp. 1856-1861, 2009.
- [15] N. Newman, “Apple ibeacon technology briefing,” J. of Direct, Data and Digital Marketing Practice, Vol.15, No.3, pp. 222-225, 2014. https://doi.org/10.1057/dddmp.2014.7
- [16] S. P. Tarzia, P. A. Dinda, R. P. Dick, and G. Memik, “Indoor localization without infrastructure using the acoustic background spectrum,” Proc. of the 9th Int. Conf. on Mobile Systems, Applications, and Services (MobiSys ’11), pp. 155-168, New York, NY, USA, 2011. https://doi.org/10.1145/1999995.2000011
- [17] M. As, H. Shimizu, B. Benaissa, K. Yoshida, and M. Köppen, “Calibration cost reduction of indoor localization using bluetooth low energy beacon,” J. Adv. Comput. Intell. Intell. Inform., Vol.26, No.1, pp. 97-106, 2022. https://doi.org/10.20965/jaciii.2022.p0097
- [18] A. H. Ismail, R. Tasaki, H. Kitagawa, and K. Terashima, “Optimum placement of wireless access point for mobile robot positioning in an indoor environment,” J. Robot. Mechatron., Vol.28, No.2, pp. 162-172, 2016. https://doi.org/10.20965/jrm.2016.p0162
- [19] I. Nagai, J. Sakai, and K. Watanabe, “Indoor self-localization using multiple magnetic sensors,” J. Robot. Mechatron., Vol.31, No.2, pp. 203-211, 2019. https://doi.org/10.20965/jrm.2019.p0203
- [20] R. Yamano and H. Kobayashi, “A preliminary research for a new self-localization method using frequency characteristics of illumination light,” Proc. of the 60th Joint Automatic Control Conf., FrSP1-2, 2017 (in Japanese).
- [21] C. Zhang and X. Zhang, “Pulsar: Towards ubiquitous visible light localization,” Proc. of the 23rd Annual Int. Conf. on Mobile Computing and Networking (MobiCom ’17), pp. 208-221, New York, NY, USA, 2017. https://doi.org/10.1145/3117811.3117821
- [22] C.-W. Hung, H. Kobayashi, J.-R. Wu, and C.-C. Song, “Low-Cost Indoor Localization Using Sound Spectrum of Light Fingerprints,” Proc. of the 2021 Int. Conf. on Artificial Life and Robotics (ICAROB2021), pp. 89-94, 2021.
- [23] C.-W. Hung, H. Kobayashi, J.-R. Wu, and C.-C. Song, “End-to-end deep learning by mcu implementation: Indoor localization by sound spectrum of light fingerprints,” J. of Robotics, Networking and Artificial Life, Vol.8, No.3, pp. 186-192, 2021.
- [24] S. Fushimi, H. Makino, and K. Nagazoe, “Flourescent light-based position information system for the visually impaired,” Panasonic Electric Works Technical Report, Vol.57, pp. 53-59, 2009 (in Japanese).
- [25] K. Yamaguchi, M. Miki, S. Kuwajima, T. Matsumoto, and H. Aida, “Verification of position estimation method of smartphone in the office by visible light communication and intelligent lighting system applications,” The 29th Annual Conf. of the Japanese Society for Artificial Intelligence (JSAI2015), Article No.1I5-5, 2015 (in Japanese). https://doi.org/10.11517/pjsai.JSAI2015.0_1I55
- [26] S. Hamidi-Rad, K. Lyons, and N. Goela, “Infrastructure-less indoor localization using light fingerprints,” Proc. of the IEEE Int. Conf. on Acoustics, Speech, and Signal Processing, pp. 5995-5999, 2017. https://doi.org/10.1109/ICASSP.2017.7953307
- [27] Y. Fujisaki and H. Kobayashi, “Self-position estimation using existing illumination light by ai-capable microcomputer,” Proc. of JSME annual Conf. on Robotics and Mechatronics (Robomec 2021), 1A1-G13, 2021. https://doi.org/10.1299/jsmermd.2021.1A1-G13
- [28] M. Nomatsu, Y. Suganuma, Y. Yui, and Y. Uchimura, “Development of an autonomous mobile robot with self-localization and searching target in a real environment,” J. Robot. Mechatron., Vol.27, No.4, pp. 356-364, 2015. https://doi.org/10.20965/jrm.2015.p0356
- [29] K. Shimane, R. Ueda, and S. Tarao, “Prototyping of kinematics simulator for supporting autonomous mobile robot development,” J. Robot. Mechatron., Vol.28, No.4, pp. 470-478, 2016. https://doi.org/10.20965/jrm.2016.p0470
- [30] K. Takahashi, T. Ono, T. Takahashi, M. Suzuki, Y. Arai, and S. Aoyagi, “Performance evaluation of robot localization using 2d and 3d point clouds,” J. Robot. Mechatron., Vol.29, No.5, pp. 928-934, 2017. https://doi.org/10.20965/jrm.2017.p0928
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.