Paper:
Convergent Conditions of Feedforward Control for Musculoskeletal Systems with Multi 1-DOF Joints Driven by Monoarticular and Biarticular Muscles
Hiroaki Ochi*, Koichi Komada**, Kenji Tahara***
 , and Hitoshi Kino**
, and Hitoshi Kino**
*Division of Mechanical Engineering, Department of Innovative Engineering, Faculty of Engineering, Ashikaga University
268-1 Omae-cho, Ashikaga-shi, Tochigi 326-8558, Japan
**Department of Mechanical and Systems Engineering, Faculty of Engineering, Chukyo University
101-2 Yagoto Honmachi, Showa-ku, Nagoya, Aichi 466-8666, Japan
***Department of Mechanical Engineering, Kyushu University
744 Motooka, Nishi-ku, Fukuoka 819-0395, Japan

Muscles in the musculoskeletal system can only transmit forces in the tensile direction, thereby resulting in redundant actuation. This redundancy creates an internal force among the muscles. The musculoskeletal potential method uses a potential field generated by the internal force among muscles and performs a step input of the muscle tension balanced at the desired posture to achieve the point-to-point (PTP) position. This method is extremely simple and does not require any sensory feedback or complex real-time calculations, as long as the target muscle tension is achieved. However, it is known that convergence to a desired posture is strongly influenced by muscular arrangement. In a previous study, we limited our analysis to a specific structure with two joints and six muscles and explained the conditions for convergence to a desired posture. However, when the structure of the target system, number of joints, and number of muscles are different, the convergence conditions cannot be clarified using the previous method. In this study, we extend the previous method to a musculoskeletal system with multiple one degrees-of-freedom (DOF) joints driven by monoarticular and biarticular muscles. In this study, we clarify the conditions that must be satisfied by the muscular arrangement to converge to a desired posture in the musculoskeletal potential method and verify the results through simulation.
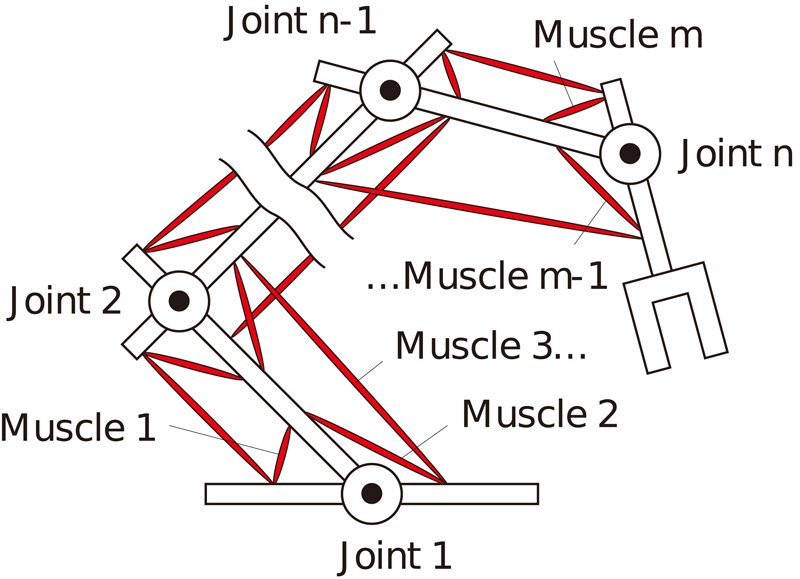
Musculoskeletal structure with multiple joints and muscles
- [1] H. Gomi and M. Kawato, “Human arm stiffness and equilibrium-point trajectory during multi-joint movement,” Biological Cybernetics, Vol.76, No.3, pp. 163-171, 1997. https://doi.org/10.1007/s004220050329
- [2] M. Kumamoto, T. Oshima, and T. Yamamoto, “Control properties induced by the existence of antagonistic pairs of bi-articular muscles – mechanical engineering model analyses,” Human Movement Sci., Vol.13, No.5, pp. 611-634, 1994. https://doi.org/10.1016/0167-9457(94)90009-4
- [3] S. Hirose and S. Ma, “Redundancy decomposition control for multi-joint manipulator,” Proc. IEEE Int. Conf. on Robot. Automat., pp. 119-124, 1989. https://doi.org/10.1109/ROBOT.1989.99977
- [4] R. Ozawa, H. Kobayashi, and K. Hashirii, “Analysis, Classification, and Design of Tendon-Driven Mechanisms,” Trans. on Robot., Vol.30, No.2, pp. 396-410, 2014. https://doi.org/10.1109/TRO.2013.2287976
- [5] K. Koganezawa and Y. Shimizu, “Stiffness Control of Tendon Driven Multi-DOF Joint by Actuator with Non Linear Elastic System (ANLES),” Proc. Int. Conf. Robot. Autom., pp. 1184-1189, 2003. https://doi.org/10.7210/jrsj.22.1043
- [6] T. Kozuki, H. Mizoguchi, Y. Asano, M. Osada, T. Shirai, J. Urata, Y. Nakanishi, K. Okada, and M. Inaba, “Design Methodology for Thorax and Shoulder of Human Mimetic Musculoskeletal Humanoid Kenshiro – A Thorax with Rib like Surface –,” 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3687-3692, 2012. https://doi.org/10.1109/IROS.2012.6386166
- [7] H. Dong, N. Figueroa, and A. E. Saddik, “Adaptive ‘load-distributed’ muscle coordination method for kinematically redundant musculoskeletal humanoid systems,” Robotics and Autonomous Systems, Vol.64, pp. 59-69, 2015. https://doi.org/10.1016/j.robot.2014.10.020
- [8] H. Ryu, Y. Nakata, Y. Okadome, Y. Nakamura, and H. Ishiguro, “Study on a Pneumatically Actuated Robot for Simulating Evolutionary Developmental Process of Musculoskeletal Structures,” J. Robot. Mechatron., Vol.28, No.2, pp. 226-233, 2016. https://doi.org/10.20965/jrm.2016.p0226
- [9] A. G. Feldman, “Once More on the Equilibrium-Point Hypothesis (λ Model) for Motor Control,” Motor Behavior, Vol.18, No.1, pp. 17-54, 1986. https://doi.org/10.1080/00222895.1986.10735369
- [10] N. Hogan, “An organizing principle for a class of voluntary movements,” J. Neuroscience, Vol.4, No.11, pp. 2745-2754, 1984. https://doi.org/10.1523/JNEUROSCI.04-11-02745.1984
- [11] M. Kawato, K. Furukawa, and R. Suzuki, “A Hierarchical Neural-Network Model for Control and Learning of Voluntary Movement,” Biol. Cybern., Vol.57, pp. 169-185, 1987. https://doi.org/10.1007/BF00364149
- [12] M. L. Latash, “Neurophysiological Basis of Movement,” Human Kinetics, 1998
- [13] N. Berustein, “Chapter II The problem of the Interrelation of Co-Ordination and Localization,” Advances in Psychology, Vol.17, pp. 77-119, 1984. https://doi.org/10.1016/S0166-4115(08)61370-9
- [14] E. P. Loeb, S. F. Giszter, P. Saltiel, E. Bizzi, and F. A. Mussa-Ivaldi, “Output units of motor behavior: An experimental and modeling study,” J. Cognitive Neuroscience, Vol.12, No.1, pp. 78-97, 2000. https://doi.org/10.1162/08989290051137611
- [15] E. Watanabe, H. Hirai, and H. I. Krebs, “Equilibrium Point-Based Control of Muscle-Driven Anthropomorphic Legs Reveals Modularity of Human Motor Control During Pedalling,” Advanced Robotics, Vol.34, Issue 5, pp. 328-342. https://doi.org/10.1080/01691864.2019.1708790
- [16] M. Kasaki, H. Ishiguro, M. Asada et al., “Cognitive Neuroscience Robotics A: Synthetic Approaches to Human Understanding,” Springer, 2016.
- [17] S. Nakamura, Y. Kobayashi, and T. Mastuura, “Grid-Based Estimation of Transformation Between Partial Relationships Using a Genetic Algorithm,” J. Robot. Mechatron., Vol.34, No.4, pp. 786-794, 2022. https://doi.org/10.20965/jrm.2022.p0786
- [18] H. Kino, S. Kikuchi, Y. Matsutani, K. Tahara, and T. Nishiyama, “Numerical Analysis of Feedforward Position Control for Non-pulley-musculoskeletal System: A case study of muscular arrangements of a two-link planar system with six muscles,” Advanced Robotics, Vol.27, No.16, pp. 1235-1248, 2013. https://doi.org/10.1080/01691864.2013.824133
- [19] H. Kino, H. Ochi, Y. Matsutani, and K. Tahara, “Sensorless Point-to-Point Control for a Musculoskeletal Tendon-Driven Manipulator: Analysis of a Two-DOF Planar System with Six Tendons,” Advanced Robotics, Vol.31, No.16, pp. 851-864, 2017. https://doi.org/10.1080/01691864.2017.1372212
- [20] H. Ochi, H. Kino, K. Tahara, and Y. Matsutani, “Geometric conditions of a two-link-and-six muscle structure based on internal force stability,” ROBOMECH J., Vol.7, Article No.17, 2020. https://doi.org/10.1186/s40648-020-00164-3
- [21] S. Arimoto, “Control theory of non-linear mechanical systems: A passivity-based and circuit-theoretic approach,” Oxford University Press, 1996.
- [22] S. Kawamura, H. Kino, and C. Won, “Higg-Speed Manipulation by Using Parallel Wire-Driven Robots,” Int. J. of ROBOTICA, Vol.18, Issue 1, pp. 13-21, 2000. https://doi.org/10.1017/S0263574799002477
- [23] M. Andelić and C. M. da Fonseca, “Sufficient conditions for positive definiteness of tridiagonal matrices revisited,” Positivity, Vol.15, Issue 1, pp. 155-159, 2011. https://doi.org/10.1007/s11117-010-0047-y
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.