Paper:
Gait Analysis and Improvement of Hexapod Mobile Robot Using Tetrahedral-Shaped Pneumatic Soft Actuators
Feifei Cho*, Kenta Hase**, Tetsuya Akagi*, Shujiro Dohta*, Takashi Shinohara*, and Masashi Yokota*
*Okayama University of Science
1-1 Ridai-cho, Kita-ku, Okayama 700-0005, Japan
**Graduate School of Engineering, Okayama University of Science
1-1 Ridai-cho, Kita-ku, Okayama 700-0005, Japan

In recent years, the aging of society has led to challenges such as ensuring adequate facility capacity and promoting health maintenance for the elderly. Consequently, there has been a growing demand for rehabilitation and fitness equipment suitable for use in limited spaces such as homes. In a previous study, a hexapod mobile robot, equipped with six tetrahedral-shaped pneumatic soft actuators (TSAs), was developed as a core training device to address these issues. However, the robot’s gait was investigated experimentally via a trial-and-error process. Hence, it is necessary to examine the stability of the gait. In this study, a straightforward model is presented for gait analysis of the mobile robot. Furthermore, the stability of the gait is demonstrated based on the analysis, and a more efficient gait with a sufficient stability margin is introduced.
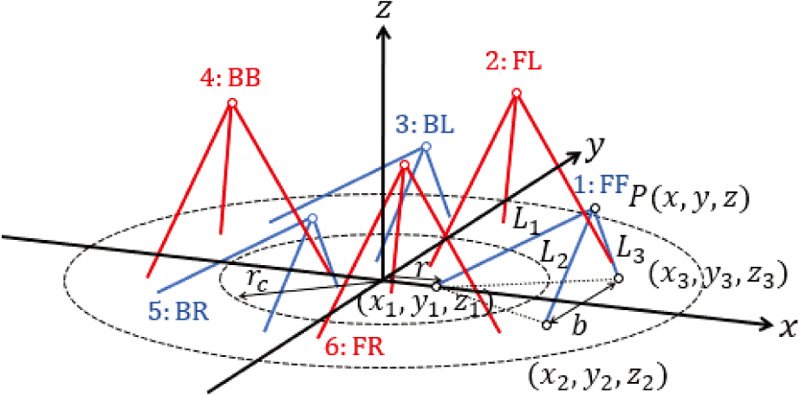
Simplified model of the mobile robot used for gait analysis
- [1] Y. Nagata, “Soft Actuators, Forefront of Development,” NTS Ltd., pp. 291-335, 2004.
- [2] T. Noritsugu, “Pneumatic Soft Actuator for Human Assist Technology,” Proc. of the 6th JFPS Int. Symp. on Fluid Power, Tsukuba, Japan, pp. 11-20, 2005.
- [3] D. Sasaki, T. Noritsugu, H. Yamamoto, and M. Takaiwa, “Development of Power Assist Glove using Pneumatic Artificial Rubber Muscle,” J. of the Robotics Society of Japan, Vol.24, No.5, pp. 640-646, 2006. https://doi.org/10.7210/jrsj.24.640
- [4] T. Noritsugu, M. Takaiwa, and D. Sasaki, “Development of Power Assist Wear Using Pneumatic Rubber Artificial Muscles,” J. Robot. Mechatron., Vol.21, No.5, pp. 607-613, 2009. https://doi.org/10.20965/jrm.2009.p0607
- [5] H. Taniguchi, S. Wakimoto, and K. Suzumori, “Development of a hand rehabilitation system to prevent contracture for finger joints based on the therapy of occupational therapists (Massage a hand and range of motion exercises using pneumatic soft actuators),” J. of the Japan Society of Mechanical Engineers, Vol.80, No.820, Article No.TRANS0348, 2014. https://doi.org/10.1299/TRANSJSME.2014TRANS0348
- [6] H. Kawasaki, S. Ito, Y. Ishigura, Y. Nishimoto, T. Aoki, T. Abe, H. Sakaeda, T. Ojika, T. Mouri, and S. Ueki, “Hand Rehabilitation Assist Robot Designed with Assistance for Thumb Opposability,” J. of the Japan Society of Mechanical Engineers, Vol.74, No.748, pp. 3019-3027, 2008. https://doi.org/10.1299/kikaic.74.3019
- [7] S. Shimooka, A. Akagi, S. Dohta, T. Shinohara, and T. Kobayashi, “Development of a Spiral Shaped Soft Holding Actuator Using Extension Type Flexible Pneumatic Actuators,” J. Robot. Mechatron., Vol.34, No.2, pp. 373-381, 2022. https://doi.org/10.20965/jrm.2022.p0373
- [8] W. Kobayashi, H. Tamaki, A. Akagi, S. Dohta, and S Shimooka, “Development of Flexible Electro-Hydraulic Spherical Actuator,” J. Robot. Mechatron., Vol.34, No.2, pp. 382-389, 2022. https://doi.org/10.20965/jrm.2022.p0382
- [9] S. Shimooka, Y. Hane, T. Akagi, S. Dohta, W. Kobayashi, T. Shinohara, and Y. Matsui, “Development and Attitude Control of Washable Portable Rehabilitation Device for Wrist without Position Sensor,” JFPS Int. J. of Fluid Power System, Vol.13, No.3, pp. 25-34, 2020. https://doi.org/10.5739/jfpsij.13.25
- [10] W. Tian, C. Jhan, M. Inokuma, A. Akagi, S. Dohta, and S. Shimooka, “Development of a Tetrahedral-Shaped Soft Robot Arm as a Wrist Rehabilitation Device Using Extension Type Flexible Pneumatic Actuators,” J. Robot. Mechatron., Vol.32, No.5, pp. 931-938, 2020. https://doi.org/10.20965/jrm.2020.p0931
- [11] K. Hase, T. Akagi, S. Dohta, T. Shinohara, W. Kobayashi, and S. Shimooka, “Development of Six-Legged Mobile Robot Using Tetrahedral Shaped Pneumatic Soft Actuators,” JFPS Int. J. of Fluid Power System, Vol.15, No.1, pp. 33-39, 2022. https://doi.org/10.5739/jfpsij.15.33
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.