Paper:
Design of an Extremely Lightweight Soft Actuator on a Pneumatic Corset for Support Lumbar Burden
Yasutaka Nishioka, Masahiro Nishihara, Toshihiko Yasuda, and Mitsuhiro Yamano
University of Shiga Prefecture
2500 Hassaka, Hikone, Shiga 522-8533, Japan

In the case of the treatment of low back pain, the lumbar corset which is the orthotic therapy is mainly used. However, there is a problem that the trunk muscle group is not used continuously by wearing the conventional lumbar corset for a long time, and muscle decline may occur. In this research, we propose an intelligent pneumatic corset that detects the forward bending posture with a sensor and automatically drives the soft actuator according to the attitude angle. It detects a forward-leaning posture in which the burden on the lumbar region increases, and automatically pressurizes the soft actuator. And, in the corset developed so far, the effect of supporting the muscle of the lumbar region was expected by compressing the abdomen and increasing abdominal pressure. In this paper, the operation support method by the restorative force when the soft actuator is deformed and the design of the intelligent pneumatic corset with built-in them are described.
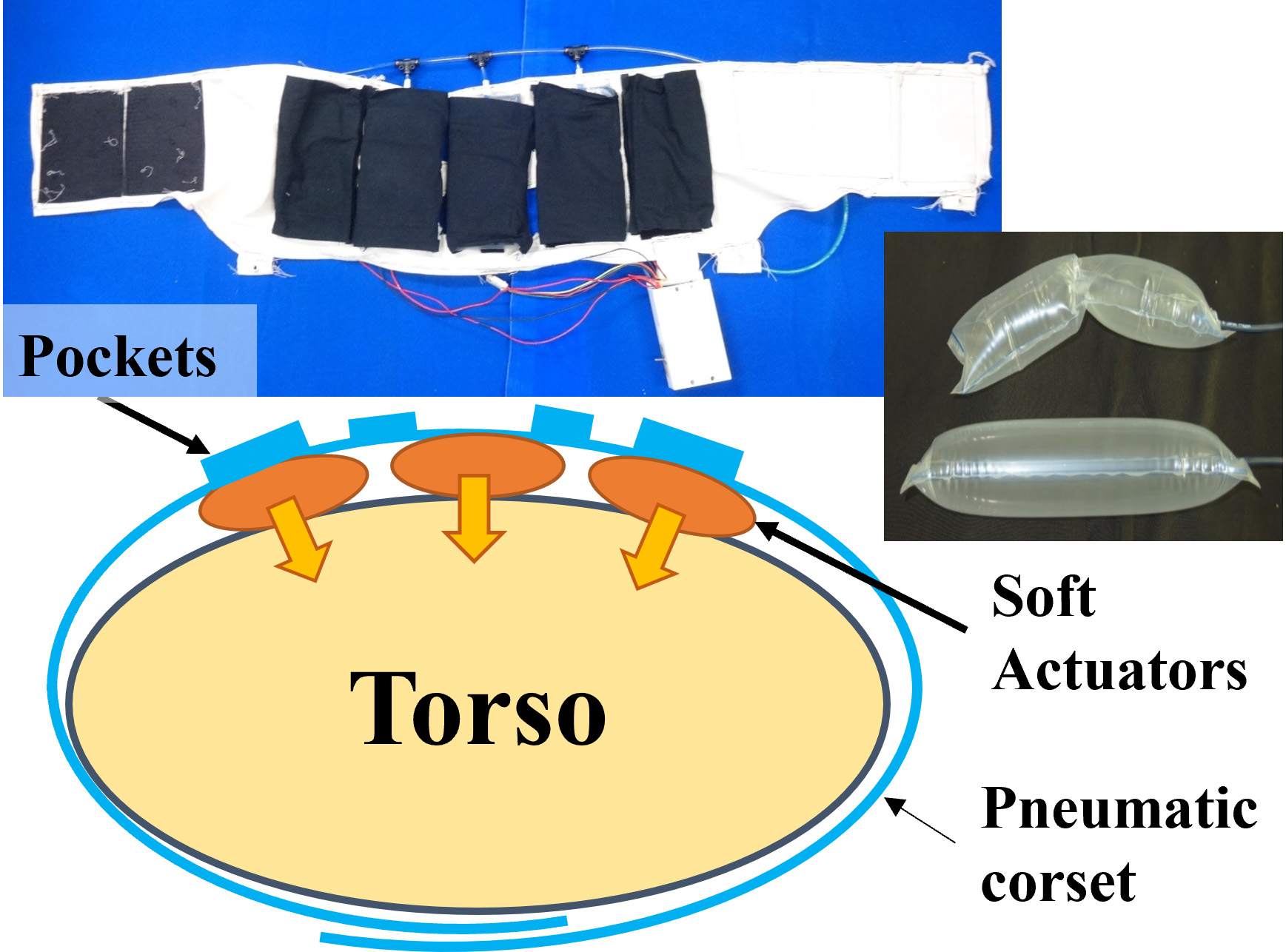
A pneumatic corset with soft actuators
- [1] M. Kobayashi, “The Study on the Effect of Lumbar Brace to lumbar muscles using the Superelastic Characteristics of Shape Memory Alloy,” Bulletin of Daido University, No.50, 2014 (in Japanese).
- [2] N. Yamazaki and N. Takahashi, “Suit-type back muscle supporter utilizing body surface deformation during care motions,” Biomechanism, Vol.17, pp. 235-244, 2004 (in Japanese).
- [3] K. Imado, H. Ikeuchi, A. Miura, T. Itho, and K. Ohnishi, “Development of a simple supporter for Reducing lower back exertion,” Biomechanism, Vol.18, pp. 79-88, 2006 (in Japanese).
- [4] Y. Imamura, T. Tanaka, Y. Suzuki, K. Takizawa, and M. Yamanaka, “Analysis of Trunk Stabilization Effect by Passive Power-Assist Device,” J. Robot. Mechatron., Vol.26, No.6, pp. 791-798, 2014.
- [5] M. Kashima, H. Arakawa, S. Kimura, R. Nishihama, K. Yokoyama, I. Kikutani, and T. Nakamura, “Development of Assist Suit for Squat Lifting Support Considering Gait and Quantitative Evaluation by Three-Dimensional Motion Analysis,” J. Robot. Mechatron., Vol.32, No.1, pp. 209-219, 2020.
- [6] H. Kobayashi, T. Aida, and T. Hashimoto, “Muscle Suit Development and Factory Application,” Int. J. Automation Technol., Vol.3, No.6, pp. 709-715, 2009.
- [7] K. Uchiyama, T. Ito, and H. Tomori, “Development of Endoskeleton Type Knee Joint Assist Orthosis Using McKibben Type Artificial Muscle,” J. Robot. Mechatron., Vol.34, No.2, pp. 390-401, 2022.
- [8] X. Li, T. Noritsugu, M. Takaiwa, and D. Sasaki, “Design of Wearable Power Assist Wear for Low Back Support Using Pneumatic Actuators,” Int. J. Automation Technol., Vol.7, No.2, pp. 228-236, 2013.
- [9] H. Arakawa, S. Mohri, Y. Yamada, K. Yokoyama, I. Kikutani, and T. Nakamura, “Proposal of Non-Rotating Joint Drive Type Power Assist Suit for Lower Limbs Considering Squat Lifting,” J. Robot. Mechatron., Vol.30, No.5, pp. 752-761, 2018.
- [10] Y. Nishioka, T. Yasuda, and M. Yamano, “Fundamental experiments on design of a pneumatic corset for supporting nursing behaviour,” Proc. of the Japan Fluid Power System Society, Vol.51, No.2, pp. 17-24, 2020 (in Japanese).
- [11] M. Yoshida, T. Tanaka, Y. Tsuchiya, and T. Kusaka, “Reducing Lumbar Load with Active Corset,” J. Robot. Mechatron., Vol.30, No.5, pp. 740-751, 2018.
- [12] A. I. Kapandji, “Kapandi joint physiology 3,” Ishiyaku Publishing Co., Ltd., 2008 (in Japanese).
- [13] J. M. Morris, D. B. Lucas, and B. Bresler, “Role of the trunk in stability of the spine,” The J. of Bone & Joint Surgery, Vol.43, Issue 3, pp. 327-351, 1961.
- [14] Y. Nishioka, M. Uesu, H. Tsuboi, S. Kawamura, W. Masuda, T. Yasuda, and M. Yamano, “Development of a Pneumatic Soft Actuator with Pleated Inflatable Structures,” Advanced Robotics, Vol.31, Issue 14, pp. 753-762, 2017.
- [15] D. Maruyama, H. Kimura, M. Koseki, and N. Inou, “Driving force and structural strength evaluation of a flexible mechanical system with a hydrostatic skeleton,” J. of Zhejiang University SCIENCE A, Vol.11, pp. 255-262, 2010.
- [16] Y. Tanase, S. Hirata, and K. Mizuno, “Effects of Lumbar Brace on Trunk forward Bending – Kinematic and Electromyographic Analysis –,” Rehabilitation Medicine, Vol.37, No.1, pp. 33-38, 2000 (in Japanese).
- [17] Z. Zhang and K. Hase, “Biomechanical Evaluation of Medical Corse,” Proc. of the Japan Society of Mechanical Engineers Kanto Branch General Meeting, Vol.19, pp. 93-94, 2013 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.