Paper:
Variable Step Type Pneumatic Linear Stepping Actuator for Passive Exercise Device of Hip Joint
Takashi Shinohara*, Kota Oe**, Tetsuya Akagi*, Shujiro Dohta*, Feifei Cho*, Wataru Kobayashi*, and So Shimooka***
*Okayama University of Science
1-1 Ridai-cho, Kita-ku, Okayama, Okayama 700-0005, Japan
**Komagane Plant, Koganei Corporation
2-6-1 Iizaka, Komagane, Nagano 399-4102, Japan
***Okayama University
3-1-1 Tsushima-naka, Kita-ku, Okayama, Okayama 700-8530, Japan

Because of the elderly society in Japan, a passive exercise device that can be used in homes or hospitals without assistance is desirable. In the device, a soft actuator that can move with both longer strokes and a larger force is useful. In the previous study, a pneumatic linear stepping actuator (PLSA) that can push and pull a flexible rod while changing the gripping position of a tube was developed. In this study, a variable step type PLSA is proposed and tested. Moreover, the development of a passive exercise device for the hip joint using three PLSAs and one connecter connected with three flexible rods and a knee supporter is described. The tracking position control of the knee supporter based on an analytical model is also described. The control system using developed actuators is also introduced.
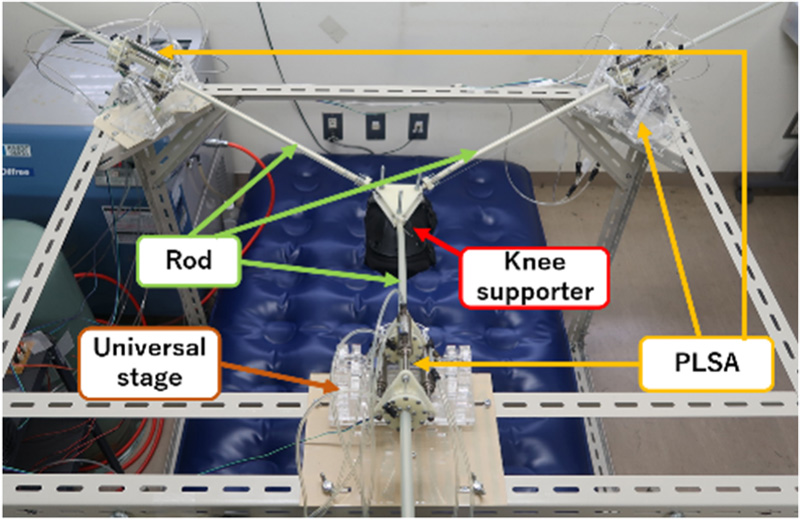
Passive exercise device using variable step PLSAs
- [1] Y. Osada, “Soft Actuators, Forefront of Development,” pp. 291-335, NTS Inc., 2004 (in Japanese).
- [2] T. Noritsugu, “Pneumatic Soft Actuator for Human Assist Technology,” Proc. of the 6th JFPS Int. Symp. on Fluid Power, pp. 11-20, 2005.
- [3] D. Sasaki, T. Noritsugu, H. Yamamoto, and M. Takaiwa, “Development of Power Assist Glove Using Pneumatic Artificial Rubber Muscle,” J. of the Robotics Society of Japan, Vol.24, No.5, pp. 640-646, 2006. https://doi.org/10.7210/jrsj.24.640
- [4] T. Noritsugu, D. Sasaki, M. Kameda, A. Fukunaga, and M. Takaiwa, “Wearable Power Assist Device for Standing Up Motion Using Pneumatic Rubber Artificial Muscles,” J. Robot. Mechatron., Vol.19, No.6, pp. 619-628, 2007. https://doi.org/10.20965/jrm.2007.p0619
- [5] T. Noritsugu, M. Takaiwa, and D. Sasaki, “Development of Power Assist Wear Using Pneumatic Rubber Artificial Muscles,” J. Robot. Mechatron., Vol.21, No.5, pp. 607-613, 2009. https://doi.org/10.20965/jrm.2009.p0607
- [6] D. Sasaki, T. Noritsugu, and M. Takaiwa, “Development of High Contractile Pneumatic Artificial Rubber Muscle for Power Assist Device,” J. Robot. Mechatron., Vol.24, No.1, pp. 150-157, 2012. https://doi.org/10.20965/jrm.2012.p0150
- [7] H. Kobayashi, T. Shiiba, and Y. Ishida, “Realization of All 7 Motions for the Upper Limb by a Muscle Suit,” J. Robot. Mechatron., Vol.16, No.5, pp. 504-512, 2004. https://doi.org/10.20965/jrm.2004.p0504
- [8] N. Saito, D. Furukawa, T. Satoh, and N. Saga, “Development of Semi-Crouching Assistive Device Using Pneumatic Artificial Muscle,” J. Robot. Mechatron., Vol.32, No.5, pp. 885-893, 2020. https://doi.org/10.20965/jrm.2020.p0885
- [9] K. Uchiyama, T. Ito, and H. Tomori, “Development of Endoskeleton Type Knee Joint Assist Orthosis Using McKibben Type Artificial Muscle,” J. Robot. Mechatron., Vol.34, No.2, pp. 390-401, 2022. https://doi.org/10.20965/jrm.2022.p0390
- [10] D. Sasaki, T. Noritsugu, and M. Takaiwa, “Wearable Master-Slave Training Device for Lower Limb Constructed with Pneumatic Rubber Artificial Muscles,” J. Robot. Mechatron., Vol.20, No.3, pp. 466-472, 2008. https://doi.org/10.20965/jrm.2008.p0466
- [11] H. Taniguchi, S. Wakimoto, and K. Suzumori, “Development of a Hand Rehabilitation System to Prevent Contracture for Finger Joints Based on the Therapy of Occupational Therapists (Massage a Hand and Range of Motion Exercises Using Pneumatic Soft Actuators),” Trans. of the JSME, Vol.80, No.820, Article No.14-00333, 2014 (in Japanese). https://doi.org/10.1299/transjsme.2014trans0348
- [12] H. Kawasaki, S. Ito, Y. Ishigure, Y. Nishimoto, T. Aoki, M. Abe, H. Sakaeda, T. Ojika, T. Mouri, and S. Ueki, “Hand Rehabilitation Assist Robot Designed with Assistance for Thumb Opposability,” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.74, No.748, pp. 3019-3027, 2008 (in Japanese). https://doi.org/10.1299/kikaic.74.3019
- [13] M. Takaiwa, T. Noritsugu, and D. Sasaki, “Wrist Rehabilitation Using Pneumatic Parallel Manipulator—Proposal of Rehabilitation Based on EMG Signal—,” Trans. of the Japan Fluid Power System Society, Vol.43, No.3, pp. 85-91, 2012 (in Japanese). https://doi.org/10.5739/jfps.43.85
- [14] Y. Eguchi, T. Akagi, and S. Dohta, “Preliminary Design of Flexible Linear Stepping Actuator Driven by Pneumatic Balloons and Brakes,” MATEC Web of Conf., Vol.51, Article No.02004, 2016. https://doi.org/10.1051/matecconf/20165102004
- [15] Y. Eguchi, T. Akagi, S. Dohta, and W. Kobayashi, “Improvement of Flexible Linear Stepping Actuator Driven by Pneumatic Balloons and Brakes,” MATEC Web of Conf., Vol.82, Article No.01005, 2016. https://doi.org/10.1051/matecconf/20168201005
- [16] N. Fukukawa, T. Akagi, S. Dohta, W. Kobayashi, and Y. Eguchi, “Development of Flexible Robot Arm with Backdrivability Using Flexible Linear Stepping Actuators,” Int. J. of Mechanical Engineering and Robotics Research, Vol.6, No.5, pp. 373-377, 2017. https://doi.org/10.18178/ijmerr.6.5.373-377
- [17] N. Fukukawa, T. Akagi, S. Dohta, W. Kobayashi, and Y. Eguchi, “Improvement of Pneumatic Chuck in Flexible Linear Stepping Actuator with Backdrivability,” Int. J. of Mechanical Engineering and Robotics Research, Vol.8, No.3, pp. 437-442, 2019. https://doi.org/10.18178/ijmerr.8.3.437-442
- [18] R. Inoue, T. Akagi, S. Dohta, W. Kobayashi, Y. Eguchi, N. Fukukawa, and T. Shinohara, “Development of Simple Rehabilitation Device Using Flexible Linear Stepping Actuators,” Int. J. of Mechanical Engineering and Robotics Research, Vol.8, No.2, pp. 316-322, 2019. https://doi.org/10.18178/ijmerr.8.2.316-322
- [19] Y. Matsui, T. Akagi, S. Dohta, W. Kobayashi, and H. Tamaki, “Development of Flexible Spherical Actuator with 3D Coordinate Measuring Device,” J. of Flow Control, Measurement & Visualization, Vol.6, No.2, pp. 95-106, 2018. https://doi.org/10.4236/jfcmv.2018.62009
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.