Paper:
Slide-Gate Type Multi-Port Switching Valve
Takumi Kobayashi, Tetsuya Akagi, Shujiro Dohta, Feifei Cho, Takashi Shinohara, and Masashi Yokota
Okayama University of Science
1-1 Ridai-cho, Kita-ku, Okayama 700-0005, Japan

In a typical pneumatic soft actuation system, the control valve is often heavy and expensive, making a compact and economical control valve highly desirable. In addition to improving the valve itself, reducing the number of valves required can also be beneficial. To address this requirement, this study proposes and tests a multi-port switching valve based on a slide-gate mechanism. This valve is designed to enable the supply or exhaust of multiple actuators simultaneously, thereby reducing the number of valves required to drive a complex pneumatic actuator with multiple chambers. The main components of the proposed valve are a rotational cam, multiple ports, and 12 gate pins. The construction and operating principle of the valve and a design method for a rotational cam are described in this study. Furthermore, the results of the designed valve for radial bending and extension of a flexible robot arm are also reported.
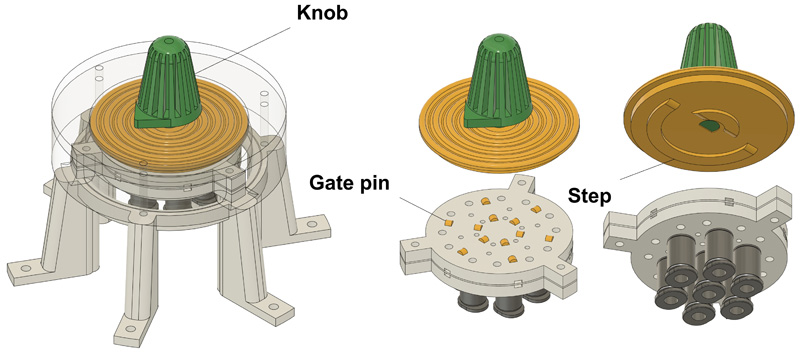
Overview of the designed side gate type multi port switching valve
- [1] K. Suzumori, “New Robotics Pioneered by Fluid Power,” J. Robot. Mechatron., Vol.32, No.5, pp. 854-862, 2020. https://doi.org/10.20965/jrm.2020.p0854
- [2] W. Kobayashi, H. Tamaki, T. Akagi, S. Dohta, and S. Shimooka, “Development of Flexible Electro-Hydraulic Spherical Actuator,” J. Robot. Mechatron., Vol.34, No.2, pp. 382-389, 2022. https://doi.org/10.20965/jrm.2022.p0382
- [3] M. Yokota and M. Takaiwa, “Gait Rehabilitation System Using a Non-Wearing Type Pneumatic Power Assist Device,” J. Robot. Mechatron., Vol.33, No.4, pp. 927-934, 2021. https://doi.org/10.20965/jrm.2021.p0927
- [4] H. Kobayashi, T. Shiiba, and Y. Ishida, “Realization of All 7 Motions for the Upper Limb by a Muscle Suit,” J. Robot. Mechatron., Vol.16, No.5, pp. 504-512, 2004. https://doi.org/10.20965/jrm.2004.p0504
- [5] S. Shimooka, T. Akagi, S. Dohta, T. Shinohara, and T. Kobayashi, “Development of a Spiral Shaped Soft Holding Actuator Using Extension Type Flexible Pneumatic Actuators,” J. Robot. Mechatron., Vol.34, No.2, pp. 373-381, 2022. https://doi.org/10.20965/jrm.2022.p0373
- [6] M. Pan, C. Yuan, X. Liang, T. Dong, T. Liu, J. Zhang, J. Zou, H. Yang, and C. Bowen, “Soft Actuators and Robotic Device for Rehabilitation and Assistance,” Advanced Intelligent Systems, Vol.4, No.4, Article No.210040, 2021. https://doi.org/10.1002/aisy.202100140
- [7] S. Jien, S. Hirai, and K. Honda, “Miniaturization Design of Piezoelectric Vibration-Driven Pneumatic Unconstrained Valves,” J. Robot. Mechatron., Vol.22, No.1, pp. 91-99, 2010. https://doi.org/10.20965/jrm.2010.p0091
- [8] S. Jing, A. Kitagawa, C. Liu, and H. Tsukagoshi, “A Study on a Sound Operated Valve for a Wearable Pneumatic System (1st Report: Development of a Pilot Valve of a Sound Operated Directional Control Valve),” J. of JFPS, Vol.39, No.3, pp. 54-60, 2008 (in Japanese). https://doi.org/10.5739/jfps.39.54
- [9] T. Akagi, S. Dohta, and S. Katayama, “Development of Small-sized Flexible Pneumatic Valve using Vibration Motor and Its Application for Wearable Actuator,” J. of Computer Applications in Technology, Vol.39, pp. 86-92, 2010. https://doi.org/10.1109/TMECH.2014.2326601
- [10] T. Kobayashi, H. Obayashi, T. Akagi, S. Dohta, W. Kobayashi, T. Shinohara, and S. Shimooka, “Design of Servo Valve using Buckled Tubes for Desired Operation of Flexible Robot Arm based of Static Analytical Model,” JFPS Int. J. Fluid Power System, Vol.15, No.3, pp. 86-94, 2022. https://doi.org/10.5739/jfpsij.15.86
- [11] T. Kobayashi, T. Akagi, S. Dohta, T. Shinohara, and S. Shimooka, “Development of Small-sized Servo Valve using Gate Mechanism and Diaphragm,” JFPS Int. J. Fluid Power System, Vol.14, No.1, pp. 1-9, 2021. https://doi.org/10.5739/jfpsij.14.1
- [12] S. Shimooka, Y. Hane, T. Akagi, S. Dohta, W. Kobayashi, T. Shinohara, and Y. Matsui, “Development and Attitude Control of Washable Portable Rehabilitation Device for Wrist without Position Sensor,” JFPS Int. J. Fluid Power System, Vol.13, No.3, pp. 25-34, 2020. https://doi.org/10.5739/jfpsij.13.25
- [13] Y. Mano, H. Sato, F. Ito, M. Okui, Y. Yamada, and T. Nakamura, “Compact Rotary Valve Mechanism for Pneumatic Mobile Robot with Periodic Air Supplying,” J. of the Robotics Society of Japan, Vol.38, No.10, pp. 965-974, 2020 (in Japanese). https://doi.org/10.7210/jrsj.38.965
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.