Paper:
Application of Noncircular Pulleys to Straight-Fiber-Type Pneumatic Artificial Muscle Manipulator
Riku Tanaka, Teppei Abe, and Hiroki Tomori

Department of Mechanical Systems Engineering, Graduate School of Science and Engineering, Yamagata University
4-3-16 Jonan, Yonezawa, Yamagata 992-8510, Japan

This study proposes a method for improving the performance of a manipulator driven by pneumatic artificial muscles. Although the straight-fiber-type pneumatic artificial muscle (SF-PAM), a kind of pneumatic artificial muscle, is lightweight and exhibits high contractile force and contraction percentage, its contractile force decreases as contraction increases. To compensate for the decrease in the SF-PAM contractile force, we developed a noncircular pulley and integrated it into the manipulator driven by a wire pulley mechanism. Because this noncircular pulley is designed in accordance with the output characteristics of SF-PAM, the contraction force of SF-PAM can be converted into manipulator torque efficiently. In addition, the radius of the noncircular pulley is expressed as a function, which can be incorporated into a numerical model for the manipulator’s controller. Subsequently, simulation and experimentation to verify the proposed method showed that, when using the same actuator, the manipulator with a noncircular pulley can optimize both output torque and range of motion better than that with a conventional circular pulley. However, a few differences between simulation results and experimental results were observed. These differences were caused by SF-PAM stretching which was not considered in the model. This drawback can be overcome by improving the SF-PAM and the numerical model in future studies. We believe that this study will provide designers of robots that coexist with humans with a high degree of freedom.
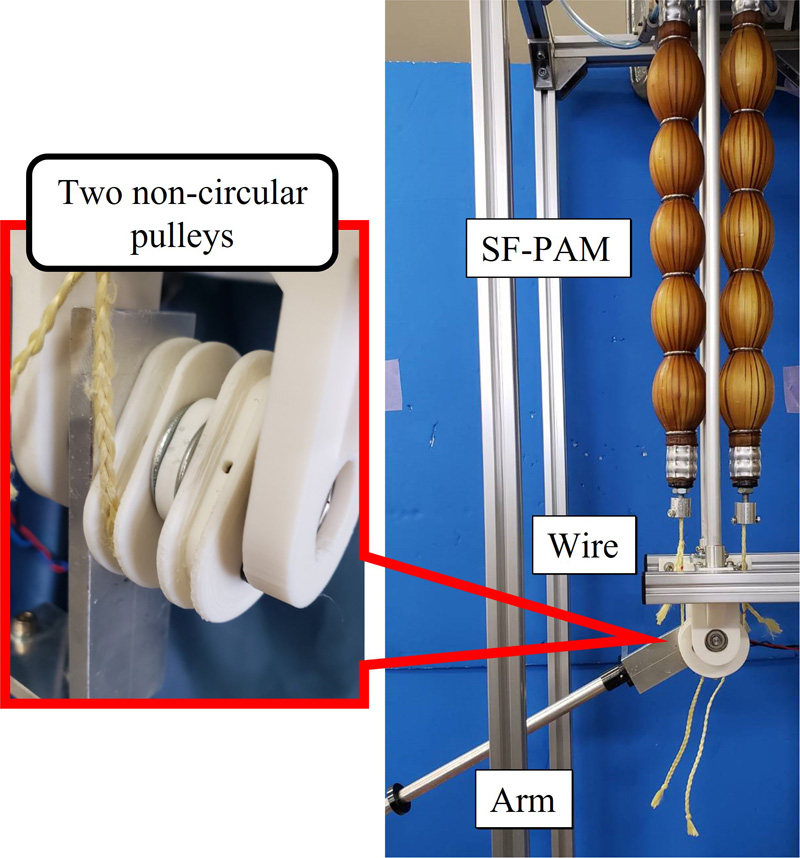
Manipulator with noncircular pulleys
- [1] C. Majidi, “Soft Robotics:A Perspective-Current Trends and Prospects for the Future,” Soft Robotics, Vol.1, No.1, pp. 5-11, 2014.
- [2] A. Bicchi and G. Tonietti, “Fast and “soft-arm” tactics [robot arm design],” IEEE Robotics & Automation Magazine, Vol.11, No.2, pp. 22-33, 2004.
- [3] N. Fukukawa, T. Akagi, S. Dohta, W. Kobayashi, and Y. Eguchi, “Development of Flexible Robot Arm with Backdrivability Using Flexible Linear Stepping Actuators,” Int. J. of Mechanical Engineering and Robotics Research, Vol.6, No.5, pp. 373-377, 2017.
- [4] Y. Feng, T. Ide, H. Nabae, G. Endo, R. Sakurai, S. Ohno, and K. Suzumori, “Safty-enhanced control strategy of a power soft robot driven by hydraulic artificial muscles,” ROBOMECH J., Vol.8, Article No.10, 2021.
- [5] C.-P. Chou and B. Hannaford, “Measurement and modeling of McKibben pneumatic artificial muscles,” IEEE Trans. on Robotics and Automation, Vol.12, No.1, pp. 90-102, 1996.
- [6] G. K. Klute, J. M. Czerniecki, and B. Hannaford, “McKibben artificial muscles: pneumatic actuators with biomechanical intelligence,” IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (Cat. No.99TH8399), pp. 221-226, 1999.
- [7] C. Chou and B. Hannaford, “Static and dynamic characteristics of McKibben pneumatic artificial muscles,” Proc. of the 1994 IEEE Int. Conf. on Robotics and Automation, Vol.1, pp. 281-286, 1994.
- [8] C. Ferraresi, W. Franco, and A. Manuello, “Flexible Pneumatic Actuators: a comparison between the McKibben and the straight fibres muscle,” J. Robot. Mechatron., Vol.13, pp. 56-63, 2001.
- [9] T. Nakamura, “Experimental Comparisons between McKibben type Artificial Muscles and Straight Fibers Type Artificial Muscles,” Proc. SPIE, Smart Structures, Devices and Systems III, Vol.6414, Article No.641426, 2007.
- [10] J. Xu, M. Xiao, and Y. Ding, “Modeling and compensation of hysteresis for pneumatic artificial muscles based on Gaussian mixture models,” Sci. China Technol. Sci., Vol.62, pp. 1094-1102, 2019.
- [11] H. Maeda, H. Nagai, H. Saito, and T. Nakamura, “Position and compliance control of an artificial muscle manipulator using a mechanical equilibrium model,” 2008 34th Annual Conf. of IEEE Industrial Electronics, pp. 3431-3436, 2008.
- [12] T. Nakamura and H. Shinohara, “Position and Force Control Based on Mathematical Models of Pneumatic Artificial Muscles Reinforced by Straight Glass Fibers,” Proc. of IEEE Int. Conf. on Robotics and Automation, Roma, Italy, pp. 4361-4366, 2007.
- [13] S. Hirose, K. Ikuta, and K. Sato, “Development of a shape memory alloy actuator. Improvement of output performance by the introduction of a σ-mechanism,” Advanced Robotics, Vol.3, Issue 2, pp. 89-108, 1988.
- [14] G. Endo, H. Yamada, A. Yajima, M. Ogata, and S. Hirose, “A Passive Weight Compensation Mechanism with a Non-Circular Pulley and a Spring,” 2010 IEEE Int. Conf. on Robotics and Automation Anchorage Convention District, pp. 3843-3848, 2010.
- [15] Y. Tsuneoka and I. Mizuuchi, “Pneumatic-driven Musculoskeletal Robot That Realizes Jumping Motion by One-shot Valve Operation,” The Proc. of JSME Annual Conf. on Robotics and Mechatronics (Robomec), 2P1-15a4, 2016 (in Japanese).
- [16] D. Shin, X. Yeh, and O. Khatib, “Variable radius pulley design methodology for pneumatic artificial muscle-based antagonistic actuation systems,” Proc. IEEE/RSJ Int. Conf. Intell. Robot. Syst., pp. 1830-1835, 2011.
- [17] D. Shin, X. Yeh, and O. Khatib, “Circular pulley versus variable radius pulley: optimal design methodologies and dynamic characteristics analysis,” IEEE Trans. on Robotics, Vol.29, No.3, pp. 766-774, 2013.
- [18] H. Tomori, Y. Midorikawa, and T. Nakamura, “Derivation of nonlinear dynamic model of novel pneumatic artificial muscle manipulator with a magnetorheological brake,” 2012 12th IEEE Int. Workshop on Advanced Motion Control (AMC 2012), 2012.
- [19] H. Tomori, T. Majima, H. Ishihara, and T. Nakamura, “Throwing Motion with Instantaneous Force using a Variable Viscoelasticity Joint Manipulator,” J. of Intelligent Material Systems and Structures (JIMSS), Vol.28, No.8, pp. 999-1009, 2016.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.