Paper:
Development of Ankle-Joint Rehabilitation Device for Bedridden Patient Using Fan-Shaped Pneumatic Soft Actuator Driven at Low Pressure
So Shimooka*1
 , Rui Suzuki*2, Takenori Uehara*3
, Takahiro Hirayama*4, and Akio Gofuku*2
, Rui Suzuki*2, Takenori Uehara*3
, Takahiro Hirayama*4, and Akio Gofuku*2
*1Graduate School of Natural Science and Technology, Okayama University
3-1-1 Tsushima-naka, Kita-ku, Okayama 700-8530, Japan
*2Graduate School of Interdisciplinary Science and Engineering in Health Systems, Okayama University
3-1-1 Tsushima-naka, Kita-ku, Okayama 700-8530, Japan
*3Dentistry and Pharmaceutical Sciences, Department of Orthopaedic Surgery, Graduate School of Medicine, Okayama University
2-5-1 Shikatacho, Kita-ku, Okayama 700-8558, Japan
*4Department of Emergency, Critical Care and Disaster Medicine, Dentistry and Pharmaceutical Sciences, Graduate School of Medicine, Okayama University
2-5-1 Shikatacho, Kita-ku, Okayama 700-8558, Japan

Recently, the number of older people and the reduction in infant birth rates in Japan have increased. Elderly against the younger increased to more than 28.9% in 2020. According to the Japanese aging society, a welfare pneumatic device to rehabilitate the temporally injured elderly and the disabled has been actively researched and developed. However, the developed rehabilitation device is almost always used for a patient who is not bedridden. Therefore, the joint of a bedridden patient is given only a passive exercise, by a physical therapist (PT). In this study, in order to reduce the burden of PTs, we aim to develop a rehabilitation device that can be used by anyone assisting the bedridden patient. The target joint was decided to be an ankle-joint because it is difficult for patients with contractions to walk. Therefore, a fan-shaped pneumatic soft actuator (FPSA) using a no-stretch hose with weaved bellows and silicone rubber string was proposed and tested. In addition, the characteristics of FPSA with different pitches and lengths are measured. To predict the bending angle of FPSA, a simplified shape analytical model of it is proposed. It can be confirmed that a calculated bending angle of FPSA using the model generally agrees with the experimental result. The proposed analytical model is a first-stage model that does not include the influence of external forces on FPSA. The ankle-joint rehabilitation device using FPSAs is proposed and tested, where an ankle-joint is changed from a plantarflexion to a dorsiflexion motion by pressurizing both FPSAs on the tested device. And it can be confirmed that a range of motion (“ROM” for short) is satisfied in an inversion and eversion driven by operating one or another FPSA on the device.
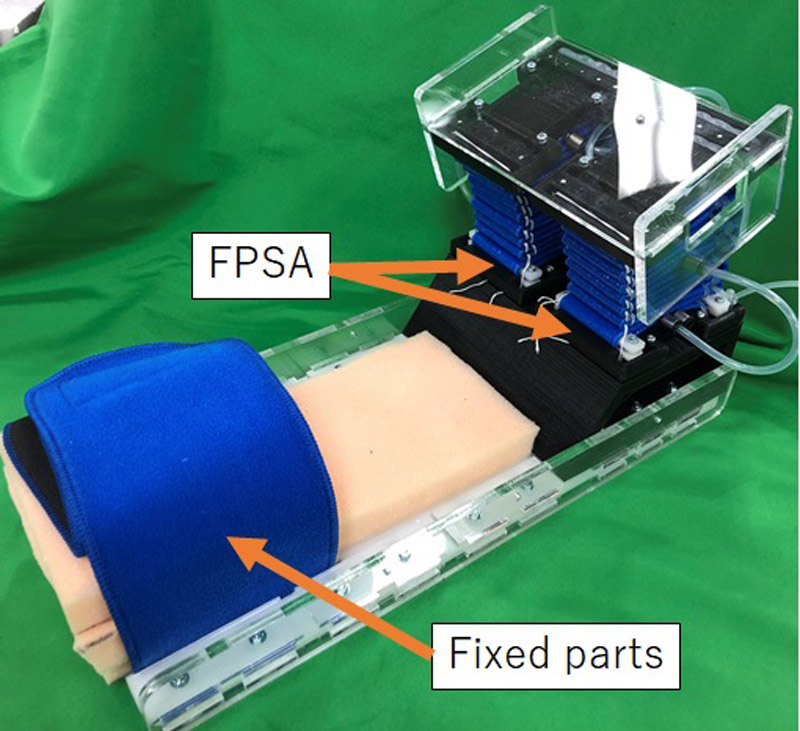
Ankle-joint rehabilitation device for bedridden patients
- [1] C. Vér, G. Hofgárt, L. Menyhárt, L. Kardos, and L. Csiba, “Ankle-Foot Continuous Passive Motion Device for Mobilization of Acute Stroke Patients,” Open J. of Therapy and Rehabilitation, Vol.3, No.2, pp. 23-34, 2015.
- [2] K. Nomura, T. Yonezawa, H. Takemura, and H. Mizoguchi, “Development of Six-DOF Human Ankle Motion Control Device Using Stewart Platform Structure for Fall Prevention,” J. Robot. Mechatron., Vol.28, No.5, pp. 654-663, 2016.
- [3] Z. Zhou, Y. Sun, N. Wang, F. Gao, K. Wei, and Q. Wang, “Robot-assisted rehabilitation of ankle Plantar Flexors spasticity: a 3-Month study with Proprioceptive neuromuscular Facilitation,” Frontiers in Neurorobotics, Vol.10, No.16, pp. 1-14, 2016.
- [4] Y. Shimizu, H. Kamada, M. Sakane, S. Aikawa, H. Mutsuzaki, K. Tanaka, H. Mishima, A. Kanamori T. Nishino, N. Ochiai, and M. Yamazaki, “A novel exercise device for venous thromboembolism prophylaxis improves venous flow in bed versus ankle movement exercises in healthy volunteers,” J. of Orthopaedic Surgery, Vol.25, No.3, pp. 1-7, 2017.
- [5] J. K. Mohanta, S. Mohan, P. Deepasundar, and R. Kiruba-Shankar, “Development and control of a new sitting-type lower limb rehabilitation robot,” Computers & Electrical Engineering, Vol.67, pp. 330-347, 2018.
- [6] F. J. Abu-Dakka, A. Valera, J. A. Escalera, M. Abderrahim, A. Page, and V. Mata, “Passive Exercise Adaptation for Ankle Rehabilitation Based on Learning Control Framework,” Sensors, Vol.20, No.21, Articel No.6215, 2020.
- [7] H. Toda and S. Sugihara, “Ankle Joint Stretching Device Using Tension Rod for Self Rehabilitation,” J. Robot. Mechatron., Vol.33, No.4, pp. 843-850, 2021.
- [8] A. Campos, E. Cortés, D. Martins, M. Ferre, and A. Contreras, “Development of a flexible rehabilitation system for bedridden patients,” J. of the Brazilian Society of Mechanical Sciences and Engineering, Vol.43, Article No.361, 2021.
- [9] M. Tagami, M. Hasegawa, W. Tanahara, and Y. Tagawa, “Prototype of a Continuous Passive Motion Device for the Knee Joint with a Function of Active Exercise,” J. Robot. Mechatron., Vol.34, No.1, pp. 28-39, 2022.
- [10] Y. Nagata, “Soft Actuators, Forefront of Development,” NTS Ltd., pp. 291-335, 2004.
- [11] T. Noritsugu, M. Takaiwa, and D. Sasaki, “Development of Power Assist Wear Using Pneumatic Rubber Artificial Muscles,” J. Robot. Mechatron., Vol.21, No.5, pp. 27-31, 2008.
- [12] Y. Matsui, T. Akagi, S. Dohta, W. Kobayashi, and H. Tamaki, “Development of Flexible Spherical Actuator with 3D Coordinate Measuring Device,” J. of Flow Control, Measurement & Visualization, Vol.6, No.2, pp. 95-106, 2018.
- [13] C. Thakur, K. Ogawa, and Y. Kurita, “Active Passive Nature of Assistive Wearable Gait Augment Suit for Enhanced Mobility,” J. Robot. Mechatron., Vol.30, No.5, pp. 717-728, 2018.
- [14] C. Ishii and K. Yoshida, “Improvement of a Lightweight Power Assist Suit for Nursing Care,” Int. J. of Engineering and Technology, Vol.11, No.4, pp. 256-261, 2019.
- [15] T. Chang, S. Koizumi, H. Nabae, G. Endo, K. Suzumori, K. Hatakeyama, S. Chida, and Y. Shimada, “A Wearable Ankle Exercise Device for Deep Vein Thrombosis Prevention Using Thin McKibben Muscles,” 2020 8th IEEE RAS/EMBS Int. Conf. for Biomedical Robotics and Biomechatronics (BioRob), pp. 42-47, 2020.
- [16] N. Saito, D. Furukawa, T. Satoh, and N. Saga, “Development of Semi-Crouching Assistive Device Using Pneumatic Artificial Muscle,” J. Robot. Mechatron., Vol.32, No.5, pp. 885-893, 2020.
- [17] Y. Shiraishi, S. Okamoto, N. Yamada, K. Inoue, Y. Akiyama, and Y. Yamada, “Pneumatically-driven stretching machine for ankle dorsiflexion: safety concepts and effectiveness test involving healthy young subjects,” ROBOMECH J., Vol.7, Article No.10, 2020.
- [18] W. Tian, C. Jhan, M. Inokuma, T. Akagi, S. Dohta, and S. Shimooka, “Development of Tetrahedral-Shaped Soft Actuator Arm as a Wrist Rehabilitation Device Using Extension Type Flexible Pneumatic Actuators,” J. Robot. Mechatron., Vol.32, No.5, pp. 931-938, 2020.
- [19] S. Shimooka, T. Akagi, S. Dohta, T. Shinohara, Y. Hane, and M. Aliff, “Development of Reinforced Extension Type Flexible Pneumatic Actuator with Circumferential Restraints and Its Application for Rehabilitation Device,” Int. J. of Automotive and Mechanical Engineering, Vol.17, No.3, pp. 8116-8127, 2020.
- [20] S. Kimura, R. Suzuki, K. Machida, M. Kashima, M. Okui, R. Nishihama, and T. Nakamura, “Development of an Exoskeleton-Type Assist Suit Utilizing Variable Stiffness Control Devices Based on Human Joint Characteristics,” Actuators, Vol.10, No.1, 2021.
- [21] H. Okamoto and H. Taniguchi, “Development of Pneumatic Exercise Device for the Range of Motion in the Ankle Joint,” 2022 IEEE/SICE Int. Symp. on System Integration, Articel No.21648781, 2022.
- [22] T. M. Miller-Jackson, R. F. Natividad, D. Y. Lee Lim, L. H. Barraza, J. W. Ambrose, and R. C. Yeow, “A Wearable Soft Robotic Exoskeleton for Hip Flexion Rehabilitation,” Frontiers in Robotics and AI, Vol.9, Article No.835237 2022.
- [23] S. Shimooka, T. Akagi, S. Dohta, T. Shinohara, and T. Kobayashi, “Development of Spiral Shaped Soft Holding Actuator Using Extension Type Flexible Pneumatic Actuators,” J. Robot. Mechatron., Vol.34 No.2, pp. 373-381, 2022.
- [24] W. Kobayashi, H. Tamaki, T. Akagi, S Dohta, and S. Shimooka, “Development of Flexible Electro-Hydraulic Spherical Actuator,” J. Robot. Mechatron., Vol.34, No.2, pp. 382-389, 2022.
- [25] M. Pan, C. Yuan, X. Liang, T. Dong, T. Liu, J. Zhang, J. Zou, H. Yang, and C. Bowen, “Soft Actuators and Robotic Devices for Rehabilitation and Assistance,” Advanced Intelligent Systems, Vol.4, Article No.2100140, 2022.
- [26] S. Shimooka, T. Tsubaki, T. Akagi, S. Dohta, and T. Shinohara, “Development of flexible ankle rehabilitation device for preventing the disuse syndrome for bedridden patient,” Proc. STSS/ISOFIC/ISSNP 2021, STSS-25, 2021.
- [27] H. Doya, N. Haraguchi, H. Niki, M. Takao, and H. Yamamoto, “Proposed novel unifi ed nomenclature for range of joint motion: method for measuring and recording for the ankles, feet, and toes,” J. of Orthopaedic Science, Vol.15, pp. 531-539, 2010.
- [28] T. Suzuki, T. Nishimori, and Y. Tanino, “Physical therapy and Estimation of locomotive disease,” Sangakusha, pp. 301-303, 2003 (in Japanese).
- [29] H. Tsukagoshi, A. Kitagawa, and Y. Kamata, “Wearable Fluid Power Composed of Transformed Flat Tube Actuators,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1178-1183, 2002.
- [30] H. Kim, A. Kawamura, Y. Nishioka, and S. Kawamura, “Mechanical design and control of inflatable robotic arms for high positioning accuracy,” Advanced Robotics, Vol.32, No.2, pp. 89-104, 2017.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.