Paper:
Device Design of Ankle Joint Stretching System Controlled by the Healthy Side Ankle Joint Movement for Self-Rehabilitation
Hideki Toda* and Hiroaki Kawamoto**
*Department of Electrical and Electronic Systems Engineering, Faculty of Engineering, University of Toyama
3190 Gofuku, Toyama, Toyama 930-8555, Japan
**Faculty of Engineering, Information and Systems, University of Tsukuba
1-1-1 Tennodai, Tsukuba, Ibaraki 305-8573, Japan

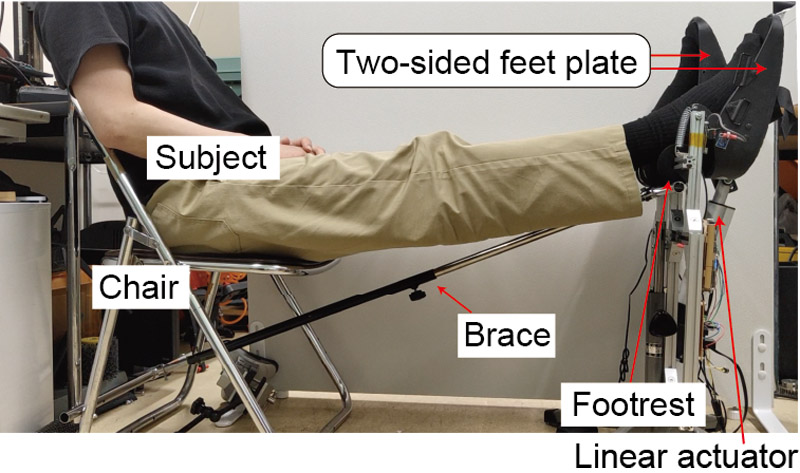
An ankle joint stretching device controlled by healthy-side ankle movements was developed for self-rehabilitation. Physical therapists treat their patients to prevent a subject ankle joint’s contracture and improve their walking function. However, sufficient rehabilitation therapy cannot be performed because of the labor demands of ankle joint rehabilitation. There has long been a demand for a self-rehabilitation system to reduce the amount of labor required, with the rehabilitation system operated by a physical therapist using a machine. Self-rehabilitation has not yet been realized. By stretching the affected ankle through the movement of the ankle on the healthy side, a self-rehabilitation device that can be used according to the will of the patient can be developed. An experiment confirmed that the device can realize affected-side ankle joint stretching by moving a foot plate connected to a linear actuator using the angle of the healthy-side ankle joint as a trigger. Ankle joint rotation angles of the affected and healthy sides were measured using two acceleration sensors. Compared with the previously used button-push-type control, healthy-side control can realize a smooth and stable affected-side sole-pushing procedure. The proposed system, which does not require operation by a physical therapist during treatment, makes self-rehabilitation of the ankle joint possible.
Healthy side ankle joint stretching device
- [1] P. J. Mansfield and D. A. Neumann, “Essentials of Kinesiology for the Physical Therapist Assistant,” 2nd Edition, Mosby, 2013.
- [2] A. Mero, P. V. Komi, and R. J. Gregor, “Biomechanics of Sprint Running,” Sports Medicine, Vol.13, No.6, pp. 376-392, 1992.
- [3] K. E. Hagbarth, J. V. Hägglund, M. Nordin, and E. U. Wallin, “Thixotropic Behaviour of Human Finger Flexor Muscles with Accompanying Changes in Spindle and Reflex Responses to Stretch,” The J. of Physiology, Vol.368, No.1, pp. 323-342, 1985.
- [4] T. Nagasawa and K. Shiraishi, “Effects of Static Stretching for Different Durations on Muscle Oxygen Saturation and Muscle Blood Flow in the Stretched Muscles,” Japan J. of Physical Education, Health and Sport Sciences, Vol.56, No.2, pp. 423-433, 2011 (in Japanese).
- [5] Y. Shiraishi, S. Okamoto, N. Yamada, K. Inoue, Y. Akiyama, and Y. Yamada, “Pneumatically-Driven Stretching Machine for Ankle Dorsiflexion: Safety Concepts and Effectiveness Test Involving Healthy Young Subjects,” ROBOMECH J., Vol.7, Article No.10, 2020.
- [6] N. Yamada, S. Okamoto, Y. Akiyama, and Y. Yamada, “Principal Motion Analysis of Manual Stretching Techniques for the Ankle Joints,” J. of Physical Therapy Science, Vol.32, No.9, pp. 584-590, 2020.
- [7] H. Toda, T. Imaeda, and R. Tanizaki, “Ankle Contracture Removal System,” JP Patent, JP2014-14493, 2014.
- [8] Y. Noda, S. Sasaki, S. Iwasa, T. Ooura, H. Tate, and M. Takahashi, “Development of a Simple Device for the Ankle Dorsiflexion Limitation of Movement Prevention,” Proc. of Hokkaido Social Insurance Hospital, Vol.6, pp. 15-18, 2006 (in Japanese).
- [9] M. Hirasawa, H. Okada, and M. Shimojo, “The Development of the Plantar Pressure Sensor Shoes for Gait Analysis,” J. Robot. Mechatron., Vol.20, No.2, pp. 289-295, 2008.
- [10] N. Saga, N. Saito, and J. Nagase, “Ankle Rehabilitation Device to Prevent Contracture Using a Pneumatic Balloon Actuator,” Int. J. Automation Technol., Vol.5, No.4, pp. 538-543, 2011.
- [11] T. Onodera, E. Suzuki, M. Ding, H. Takemura, and H. Mizoguchi, “Force, Stiffness and Viscous Damping Control of a Stewart-Platform-Type Ankle-Foot Rehabilitation Assist Device with Pneumatic Actuator,” J. Robot. Mechatron., Vol.25, No.6, pp. 897-905, 2013.
- [12] K. Nomura, T. Yonezawa, H. Takemura, and H. Mizoguchi, “Development of Six-DOF Human Ankle Motion Control Device Using Stewart Platform Structure for Fall Prevention,” J. Robot. Mechatron., Vol.28, No.5, pp. 654-663, 2016.
- [13] E. Tanaka, T. Ikehara, H. Yusa, Y. Sato, T. Sakurai, S. Saegusa, K. Ito, and L. Yuge, “Walking-Assistance Apparatus as a Next-Generation Vehicle and Movable Neuro-Rehabilitation Training Appliance,” J. Robot. Mechatron., Vol.24, No.5, pp. 851-865, 2012.
- [14] D. Matsuura, T. Koga, S. Ishida, and Y. Takeda, “Kinetostatic Design of Ankle Rehabilitation Mechanism Capable of Adapting to Changes in Joint Axis,” J. Robot. Mechatron., Vol.25, No.6, pp. 1029-1037, 2013.
- [15] H. Toda, T. Matsumoto, R. Tanizaki, and T. Imaeda, “Ankle Joint Pushing Mechanism by Stabilization of Ankle Position Using a Brace Structure,” J. of Advanced Mechanical Design, Systems, and Manufacturing, Vol.10, No.1, Article No.15-00506, 2016.
- [16] H. Toda, T. Matsumoto, and H. Takeuchi, “Experimental Study of Ankle Joint Pushing Mechanism Concerning About the Horizontal Movement of Talus,” J. Robot. Mechatron., Vol.29, No.2, pp. 299-305, 2017.
- [17] H. Toda and S. Sugihara, “Ankle Joint Stretching Device Using Tension Rod for Self Rehabilitation,” J. Robot. Mechatron., Vol.33, No.4, pp. 843-850, 2021.
- [18] J. Barth, S. Geed, A. Mitchell, P. S. Lum, D. F. Edwards, and A. W. Dromerick, “Characterizing Upper Extremity Motor Behavior in the First Week After Stroke,” PLOS ONE, Vol.15, No.8, Article No.e0221668, 2020.
- [19] M. E. Stoykov, E. King, F. J. David, A. Vatinno, L. Fogg, and D. M. Corcos, “Bilateral motor priming for post stroke upper extremity hemiparesis: A randomized pilot study,” Restorative Neurology and Neuroscience, Vol.38, No.1, pp. 11-22, 2020.
- [20] W. Russel, L. Pritchard-Wiart, and P. J. Manns, “Clinician perspectives on cross-education in stroke rehabilitation,” Disability and Rehabilitation, Vol.40, No.22, pp. 2644-2649, 2018.
- [21] E. S. Rosenzweig et al., “Extensive spontaneous plasticity of corticospinal projections after primate spinal cord injury,” Nature Neuroscience, Vol.13, No.12, pp. 1505-1510, 2010.
- [22] J. J. Summers, F. A. Kagerer, M. J. Garry, C. Y. Hiraga, A. Loftus, and J. H. Cauraugh, “Bilateral and unilateral movement training on upper limb function in chronic stroke patients: A TMS study,” J. of the Neurological Sciences, Vol.252, No.1, pp. 76-82, 2007.
- [23] P.-M. Chen, P. W. H. Kwong, C. K. Y. Lai, and S. S. M. Ng, “Comparison of bilateral and unilateral upper limb training in people with stroke: A systematic review and meta-analysis,” PLOS ONE, Vol.14, No.5, Article No.e0216357, 2019.
- [24] J. H. Morris, F. v. Wijck, S. Joice, S. A. Ogston, I. Cole, and R. S. MacWalter, “A comparison of bilateral and unilateral upper-limb task training in early poststroke rehabilitation: A randomized controlled trial,” Archives of Physical Medicine and Rehabilitation, Vol.89, No.7, pp. 1237-1245, 2008.
- [25] Y. Sun, N. M. H. Ledwell, L. A. Boyd, and E. P. Zehr, “Unilateral wrist extension training after stroke improves strength and neural plasticity in both arms,” Experimental Brain Research, Vol.236, No.7, pp. 2009-2021, 2018.
- [26] G. Meng, X. Meng, Y. Tan, J. Yu, A. Jin, Y. Zhao, and X. Liu, “Short-term Efficacy of Hand-Arm Bimanual Intensive Training on Upper Arm Function in Acute Stroke Patients: A Randomized Controlled Trial,” Frontiers in Neurology, Vol.8, Article No.726, 2018.
- [27] M. A. Urbin, M. L. Harris-Love, A. R. Carter, and C. E. Lang, “High-Intensity, Unilateral Resistance Training of a Non-Paretic Muscle Group Increases Active Range of Motion in a Severely Paretic Upper Extremity Muscle Group After Stroke,” Frontiers in Neurology, Vol.6, Article No.119, 2015.
- [28] L. Dodakian, J. C. Stewart, and S. C. Cramer, “Motor imagery during movement activates the brain more than movement alone after stroke: A pilot study,” J. of Rehabilitation Medicine, Vol.46, No.9, pp. 843-848, 2014.
- [29] L. Cid, A. Pires, C. Borrego, P. Duarte-Mendes, D. S. Teixeira, J. M. Moutão, and D. Monteiro, “Motivational determinants of physical education grades and the intention to practice sport in the future,” PLOS ONE, Vol.14, No.5, Article No.e0217218, 2019.
- [30] D. Rand, N. Givon, H. Weingarden, A. Nota, and G. Zeilig, “Eliciting upper extremity purposeful movements using video games: A comparison with traditional therapy for stroke rehabilitation,” Neurorehabilitation and Neural Repair, Vol.28, No.8, pp. 733-739, 2014.
- [31] Z. Bai and K. N. K. Fong, “‘Remind-to-Move’ Treatment Enhanced Activation of the Primary Motor Cortex in Patients with Stroke,” Brain Topography, Vol.33, No.2, pp. 275-283, 2020.
- [32] C. Wang et al., “Multi-Arm lower-limb rehabilitation robot for motor coordination training after stroke,” The J. of Engineering, Vol.2019, No.14, pp. 478-484, 2019.
- [33] H. Rodgers et al., “Robot assisted training for the upper limb after stroke (RATULS): A multicentre randomised controlled trial,” The Lancet, Vol.394, No.10192, pp. 51-62, 2019.
- [34] S. Kubota et al., “Application of a newly developed upper limb single-joint hybrid assistive limb for postoperative C5 paralysis: An initial case report indicating its safety and feasibility,” J. of Clinical Neuroscience, Vol.50, pp. 268-271, 2018.
- [35] Society of Biomechanisms Japan, “Hand Encyclopedia,” p. 156, Asakura Publishing Co., Ltd., 2017 (in Japanese).
- [36] R. G. Carson, “Neural pathways mediating bilateral interactions between the upper limbs,” Brain Research Reviews, Vol.49, No.3, pp. 641-662, 2005.
- [37] K. Dragert and E. P. Zehr, “Bilateral neuromuscular plasticity from unilateral training of the ankle dorsiflexors,” Experimental Brain Research, Vol.208, No.2, pp. 217-227, 2011.
- [38] J. Takagi, “Man-machine system safety and non-linearity,” Safety, Vol.25, No.2, pp. 14-17, 1974 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.