Paper:
Autonomous Flight Using UWB-Based Positioning System with Optical Flow Sensors in a GPS-Denied Environment
Yoshiyuki Higashi*
 and Kenta Yamazaki**
and Kenta Yamazaki**
*Faculty of Mechanical Engineering, Kyoto Institute of Technology
Goshokaido-cho, Matsugasaki, Sakyo-ku, Kyoto, Kyoto 606-8585, Japan
**Division of Mechanodesign, Kyoto Institute of Technology
Goshokaido-cho, Matsugasaki, Sakyo-ku, Kyoto, Kyoto 606-8585, Japan

This study presents the positioning method and autonomous flight of a quadrotor drone using ultra-wideband (UWB) communication and an optical flow sensor. UWB communication obtains the distance between multiple ground stations and a mobile station on a robot, and the position is calculated based on a multilateration method similar to global positioning system (GPS). The update rate of positioning using only UWB communication devices is slow; hence, we improved the update rate by combining the UWB and inertial measurement unit (IMU) sensor in the prior study. This study demonstrates the improvement of the positioning method and accuracy by sensor fusion of the UWB device, an IMU, and an optical flow sensor using the extended Kalman filter. The proposed method is validated by hovering and position control experiments and also realizes a sufficient rate and accuracy for autonomous flight.
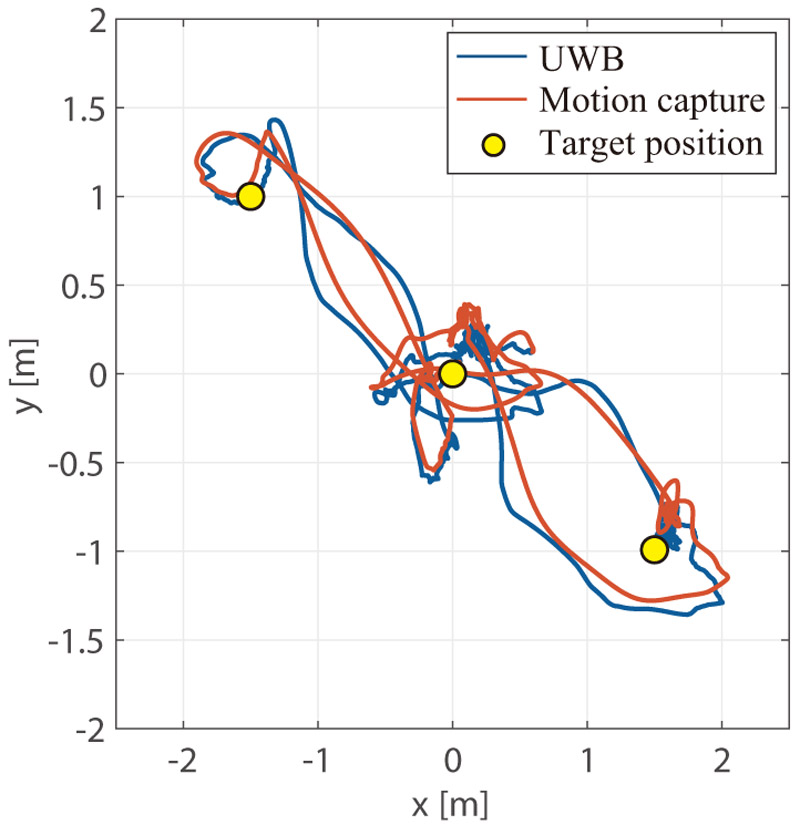
Position control using UWB communication
- [1] F. Yakushiji, K. Yakushiji, M. Murata, N. Hiroi, K. Takeda, and H. Fujita, “The quality of blood is not affected by drone transport: An evidential study of the unmanned aerial vehicle conveyance of transfusion material in Japan,” Drones, Vol.4, No.1, Article No.4, 2020.
- [2] M. Kunovjanek and C. Wankmüller, “Containing the COVID-19 pandemic with drones – Feasibility of a drone enabled back-up transport system,” Transport Policy, Vol.106, pp. 141-152, 2021.
- [3] L. Shi, G. Mehrooz, and R. H. Jacobsen, “Inspection path planning for aerial vehicles via sampling-based sequential optimization,” 2021 Int. Conf. on Unmanned Aircraft Systems (ICUAS), pp. 679-687, 2021. https://doi.org/10.1109/ICUAS51884.2021.9476784
- [4] R. Ashour, T. Taha, F. Mohamed, E. Hableel, Y. A. Kheil, M. Elsalamouny, M. Kadadha, K. Rangan, J. Dias, L. Seneviratne, and G. Cai, “Site inspection drone: A solution for inspecting and regulating construction sites,” 2016 IEEE 59th Int. Midwest Symp. on Circuits and Systems (MWSCAS), pp. 1-4, 2016. https://doi.org/10.1109/MWSCAS.2016.7870116
- [5] A. Shihavuddin, X. Chen, V. Fedorov, A. N. Christensen, N. A. B. Riis, K. Branner, A. B. Dahl, and R. R. Paulsen, “Wind turbine surface damage detection by deep learning aided drone inspection analysis,” Energies, Vol.12, No.4, Article No.676, 2019.
- [6] S. Akahori, Y. Higashi, and A. Masuda, “Development of an aerial inspection robot with EPM and camera arm for steel structures,” 2016 IEEE Region 10 Conf. (TENCON), pp. 3542-3545, 2016.
- [7] K. Takeuchi, A. Masuda, S. Akahori, Y. Higashi, and N. Miura, “A close inspection and vibration sensing aerial robot for steel structures with an EPM-based landing device,” Nondestructive Characterization and Monitoring of Advanced Materials, Aerospace, and Civil Infrastructure 2017, Article No.101692U, 2017.
- [8] A. Masuda, A. Tanaka, Y. Higashi, and N. Miura, “Reliable activation of an EPM-based clinging device for aerial inspection robots,” J. Robot. Mechatron., Vol.31, No.6, pp. 827-836, 2019.
- [9] Y. Higashi, K. Yamazaki, A. Masuda, N. Miura, and Y. Sawada, “Attractive force estimation of a magnetic adsorption unit for inspection UAVs,” J. Robot. Mechatron., Vol.33, No.6, pp. 1349-1358, 2021.
- [10] M. W. Mueller and R. D’Andrea, “Stability and control of a quadrocopter despite the complete loss of one, two, or three propellers,” 2014 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 45-52, 2014.
- [11] P. Araújo, R. Miranda, D. Carmo, R. Alves, and L. Oliveira, “Air-SSLAM: A visual stereo indoor SLAM for aerial quadrotors,” IEEE Geoscience and Remote Sensing Letters, Vol.14, No.9, pp. 1643-1647, 2017.
- [12] S. Suzuki, “Integrated navigation for autonomous drone in GPS and GPS-denied environments,” J. Robot. Mechatron., Vol.30, No.3, pp. 373-379, 2018.
- [13] S. Akahori, Y. Higashi, and A. Masuda, “Position estimation system with UWB, IMU and a distance sensor for quad-rotors,” 2017 IEEE Region 10 Conf. (TENCON 2017), pp. 1992-1996, 2017.
- [14] Y. Yasukawa, Y. Higashi, A. Masuda, and N. Miura, “Automatic anchor calibration for UWB-based indoor positioning systems,” 2020 IEEE Region 10 Conf. (TENCON), pp. 1374-1379, 2020.
- [15] S. Nakamura, Y. Higashi, A. Masuda, and N. Miura, “A positioning system and position control system of a quad-rotor applying Kalman filter to an UWB module and an IMU,” 2020 IEEE/SICE Int. Symp. on System Integration (SII), pp. 747-752, 2020.
- [16] D. M. Henderson, “Euler angles, quaternions, and transformation matrices for space shuttle analysis,” NASA Design Note No.1.4-8-020, NASA-CR-151435, 1977.
- [17] K. Nonami, “Introduction to drone engineering – Modeling and control –,” Corona Publishing Co., Ltd., pp. 18-35, 2020 (in Japanese).
- [18] D. E. Manolakis, “Efficient solution and performance analysis of 3-D position estimation by trilateration,” IEEE Trans. on Aerospace and Electronic Systems, Vol.32, No.4, pp. 1239-1248, 1996.
- [19] F. Thomas and L. Ros, “Revisiting trilateration for robot localization,” IEEE Trans. on Robotics, Vol.21, No.1, pp. 93-101, 2005.
- [20] Z. Zuo, “Quadrotor trajecotry tracking control: A PD control algorithm,” 3rd Int. Conf. on Computer and Electrical Engineering (ICCEE 2010), 2010.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.