Paper:
Horizontal Fixed Attitude Flight of Quad Rotor Helicopter with Tilting Rotor
Akitaka Imamura

Faculty of Engineering, Osaka Sangyo University
3-1-1 Nakagaito, Daito, Osaka 574-8530, Japan

A quad rotor helicopter (QRH), a type of unmanned aerial vehicle (UAV), uses a tilted attitude to generate a horizontal thrust component in the flying direction. In the case of autonomous control, the attitude control system is used to tilt the airframe against disturbances such as crosswinds. Consequently, the flying attitude of a QRH is always inclined. In this study, a tilting mechanism for rotors (TMR) was mounted on a QRH to maintain a horizontal attitude. The TMRs were tilted to generate thrust against disturbances without inclining the airframe. The system was constructed using a QRH and TMRs tilted around only one axis and allocated every 90°. Because the airframe is always horizontal, this system can be used for the precise measurement of landforms and buildings. This paper reports the dynamic modeling of QRH equipped with TMRs and discusses the horizontal constant attitude flight using the proposed system.
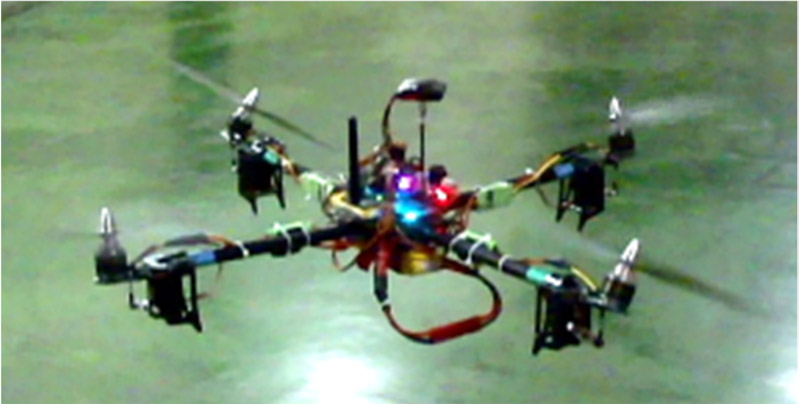
Mechanism to keep quadcopter horizontal
- [1] A. Imamura, M. Miwa, and J. Hino, “Flight Characteristics of Quad Rotor Helicopter with Thrust Vectoring Equipment,” J. Robot. Mechatron., Vol.28, No.3, pp. 334-342, 2016.
- [2] A. Imamura, Y. Urashiri, M. Miwa, and J. Hino, “Flight Characteristics of Quad Rotor Helicopter with Tilting Rotor,” The J. of Instrumentation, Automation and Systems, Vol.1, No.2, pp. 56-63, 2014.
- [3] M. Ryll, H. H. Bülthoff, and P. R. Giordano, “Modeling and Control of a Quadrotor UAV with Tilting Propellers,” 2012 IEEE Int. Conf. on Robotics and Automation, pp. 4606-4613, 2012.
- [4] M. Ryll, H. H. Bülthoff, and P. R. Giordano, “First Flight Tests for a Quadrotor UAV with Tilting Propellers,” 2013 IEEE Int. Conf. on Robotics and Automation, pp. 295-302, 2013.
- [5] A. Imamura, M. Miwa, and J. Hino, “Level Maintenance of Quad Rotor Helicopter by Tilt Rotor Mechanism,” Proc. of the 15th SICE System Integration Division Annual Conf. (SI2014), 3M1-3, 2014.
- [6] A. Imamura and M. Miwa, “Fixed Altitude Control of Quad Rotor Helicopter with Tilting Rotor,” Proc. of 46th Japan Society for Aeronautical and Space Sciences (JSASS) Annual Meeting, Article No.B24, 2015.
- [7] A. Imamura and M. Miwa, “Modelling and Control of a Tilt Type Quad-Rotor Helicopter,” Proc. of 47th Japan Society for Aeronautical and Space Sciences (JSASS) Annual Meeting, Article No.1B7, 2016.
- [8] A. Imamura and M. Miwa, “Basis Study of Tilting Rotor Type Quadcopter – The Frame Construction of H Type and + Types Is Compared –,” The Proc. of 2016 JSME Annual Conf. on Robotics and Mechatronics, Article No.1P1-17b4, 2016.
- [9] A. Oosedo, S. Abiko, S. Narasaki, A. Kuno, and M. Uchiyama, “Position and Attitude Independent Flight Control of 4 Tilt Rotor UAV,” Proc. of the 32nd Annual Conf. of the Robotics Society of Japan, Article No.RSJ2014AC3M1-01, 2014 (in Japanese).
- [10] A. Oosedo, S. Abiko, A. Kuno, S. Narasaki, S. Kokubun, and A. Konno, “Pitch Up Hovering Flight Control of a Quad Tilt Rotor UAV,” The Proc. of 2015 JSME Annual Conf. on Robotics and Mechatronics, Article No.2A1-G03, 2015 (in Japanese).
- [11] M. Miwa, S. Uemura, and A. Imamura, “Arbitrary Attitude Hovering Control of Quad Tilt Rotor Helicopter,” J. Robot. Mechatron., Vol.28, No.3, pp. 328-333, 2016.
- [12] R. Akbar, B. Sumantri, H. Katayama, S. Sano, and N. Uchiyama, “Reduced-Order Observer Based Sliding Mode Control for a Quad-Rotor Helicopter,” J. Robot. Mechatron., Vol.28, No.3, pp. 304-313, 2016.
- [13] A. Imamura, M. Miwa, and J. Hino, “Flight Characteristics of a Quadrotor Helicopter Using Extra Deflecting Thrusters,” The J. of Instrumentation, Automation and Systems, Vol.1, No.2, pp. 64-71, 2014.
- [14] A. Imamura, S. Uemura, M. Miwa, and J. Hino, “Flight Characteristics of Quad Ducted Fan Helicopter with Thrust Vectoring Nozzles,” The J. of Unmanned System Technology, Vol.2, No.1, pp. 54-61, 2014.
- [15] K. Nonami, “Introduction to Drone Engineering – From Modeling to Control –,” p. 61, Corona Publishing Co., Ltd., 2020 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.