Paper:
Yaw-Rate Controller Tuning for Autonomous Driving: Virtual Internal Model Tuning Approach
Motoya Suzuki
 and Shuichi Yahagi
and Shuichi Yahagi
Isuzu Advanced Engineering Center, Ltd.
8 Tsuchidana, Fujisawa, Kanagawa 252-0881, Japan

Vehicle yaw-rate control is important for realizing autonomous driving. If the desired yaw-rate response is realized, good autonomous driving can be realized. The gain-scheduled controller should be designed because vehicle has time-variant properties. However, it is difficult to design gain-scheduled controller in the case where vehicle parameters are unknown. To solve this problem, we expand virtual internal model tuning (VIMT) so as to realize desired yaw-rate responses. VIMT can tune the feedback controller by using one-shot experiment data. The processing cost is extremely low because the controller parameter can be obtained by using least square methods. In this study, we verify the validity of the proposed method through vehicle simulator of TruckMaker.
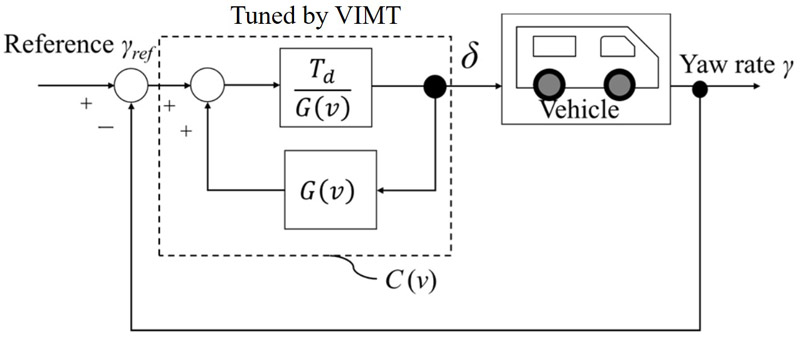
Yaw-rate controller tuning via VIMT
- [1] A. Geiger, P. Lenz, and R. Urtasun, “Are we ready for autonomous driving? the kitti vision benchmark suite,” Proc. of 2012 IEEE Conf. on Computer Vision and Pattern Recognition, pp. 3354-3361, 2012. https://doi.org/10.1109/CVPR.2012.6248074
- [2] M. Nagai and H. Yoshida, “Evolution and Evaluation of Safety Offered by Active Safety, ADAS, and AD Systems,” J. Robot. Mechatron., Vol.32, No.3, pp. 484-493, 2020. https://doi.org/10.20965/jrm.2020.p0484
- [3] H. M. Li, X. B. Wang, S. B. Song, and H. Li, “Vehicle control strategies analysis based on PID and fuzzy logic control,” Procedia Engineering, Vol.137, pp. 234-243, 2016. https://doi.org/10.1016/j.proeng.2016.01.255
- [4] N. Matsumoto and M. Tomizuka, “Vehicle lateral velocity and yaw rate control with two independent control inputs,” ASME J. of Dynamic Systems, Measurement, Control, Vol.114, No.4, pp. 606-613, 1992. https://doi.org/10.23919/ACC.1990.4791052
- [5] Y. Tahara, M. Hirata, and M. Suzuki, “Robust PID yaw-rate control based on active front-wheel steering through a steer-by-wire system,” Proc. of the 63rd Japan Joint Automatic Control Conf., pp. 75-80, 2020 (in Japanese). https://doi.org/10.11511/jacc.63.0_75
- [6] M. C. Campi, A. Lecchini, and S. M. Savaresi, “Virtual reference feedback tuning: a direct method for the design of feedback controllers,” Automatica, Vol.38, No.8, pp. 1337-1346, 2002. https://doi.org/10.1016/S0005-1098(02)00032-8
- [7] S. Soma, O. Kaneko, and T. Fujii, “A new method of controller parameter tuning based on input-output data – Fictitious Reference Iterative Tuning (FRIT) –,” IFAC Proc. Volumes, Vol.37, No.12, pp. 789-794, 2004. https://doi.org/10.1016/S1474-6670(6)31566-5
- [8] T. Ikezaki and O. Kaneko, “A New Approach of Data-Driven Controller Tuning Method By Using Virtual IMC Structure – Virtual Internal Model Tuning –,” IFAC-PapersOnLine, Vol.52, No.29, pp. 344-349, 2019. https://doi.org/10.1016/j.ifacol.2019.12.699
- [9] T. Ikezaki and O. Kaneko, “Simultaneous Update of Controller and Model by Using Virtual Internal Model Tuning,” IFAC-PapersOnLine, Vol.53, No.2, pp. 4468-4473, 2020. https://doi.org/10.1016/j.ifacol.2020.12.448
- [10] M. Suzuki and O. Kaneko, “Closed-loop response estimation based on data-driven control approach and its application to vehicle yaw-rate control of autonomous driving,” Proc.s of 61th Annual Conf. of the Society of Instrument and Control Engineers of Japan (SICE), pp. 1083-1088, 2022. https://doi.org/10.23919/SICE56594.2022.9905773
- [11] R. Rajamani, “Vehicle dynamics and control 2nd edition,” Springer Science & Business Media, 2011.
- [12] D. E. Rivera, M. Morari, and S. Skogestad, “Internal model control: PID controller design,” Industrial & Engineering Chemistry Process Design and Development, Vol.25, No.1, pp. 252-265, 1986.
- [13] R. Cajo, S. Zhao, C. M. Ionescu, R. De Keyser, D. Plaza, and S. Liu, “IMC based PID Control Applied to the Benchmark PID18,” IFAC-Papers OnLine, Vol.51, No.4, pp. 728-732, 2018. https://doi.org/10.1016/j.ifacol.2018.06.210
- [14] Y. Matsui, H. Ayano, S. Masuda, and K. Nakano, “Realization of prefilter for Virtual Reference Feedback Tuning using closed-loop step response data,” J. Robot. Mechatron., Vol.28, No.5, pp. 707-714, 2016. https://doi.org/10.20965/jrm.2016.p0707
- [15] T. Ikezaki and O. Kaneko, “Improvement of Control Performance in Virtual Internal Model Tuning with Pre-filter,” Trans. of the Society of Instrument and Control Engineers, Vol.57, No.3, pp. 177-184, 2021 (in Japanese). https://doi.org/10.9746/sicetr.57.177
- [16] R. Kajiwara, S. Masuda, and Y. Matsui, “A design method for an optimal pre-filter in FRIT using closed-loop step response data,” Proc. of 56th Annual Conf. of the Society of Instrument and Control Engineers of Japan (SICE), pp. 255-258, 2017. https://doi.org/10.23919/SICE.2017.8105763
- [17] Y. Endo, S. Otsuki, T. Okamoto, T. Koga, and K. Nakashima, “Auto Tuning of PID Controllers for Dynamic Positioning Systems with Nonlinearity,” Trans. of the Institute of Systems, Control and Information Engineers, pp. 242-249, 2020 (in Japanese). https://doi.org/10.5687/iscie.33.242
- [18] M. Suzuki, “Gain-scheduled Control with Data-driven Control and Model-matching Method for Vehicle,” IEEJ Trans. on Electronics, Information and Systems, Vol.142, No.5, pp. 607-615, 2022 (in Japanese). https://doi.org/10.1541/ieejeiss.142.607
- [19] Y. Nagayama, “A Half Century of Isuzu ELF,” Isuzu Technical Report, Vol.123, pp. 35-39, 2011 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.