Letter:
Monitoring System Using Ceiling Camera and Mobile Robot
Junji Satake, Futoshi Jogo, Kurumi Hiraki, Kohei Iwasaki, and Taisei Shirouzu
Fukuoka Institute of Technology
3-30-1 Wajiro-higashi, Higashi-ku, Fukuoka 811-0295, Japan

In this letter, we propose a monitoring system that employs a ceiling camera and a mobile robot. Ceiling camera is used to estimate the position of a fallen person, which is used by the robot to navigate to the person’s vicinity to examine his or her condition. This is done by transmitting the height information of obstacles and the fallen person from the ceiling camera to the robot so that it can accurately localize itself and plan a safe route. An actual system was constructed and verified that the required movements could be executed.
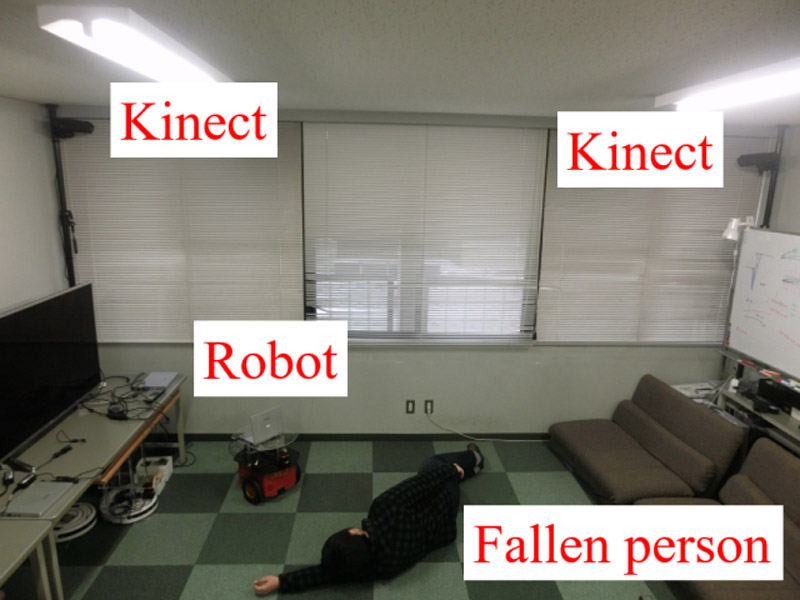
Monitoring system
- [1] K. Matsuo et al., “Unconstrained measurement of heart rate considering harmonics of respiratory signal using flexible tactile sensor sheet,” J. Robot. Mechatron., Vol.33, No.4, pp. 826-832, 2021.
- [2] H. Aoki et al., “Non-contact respiration measurement using structured light 3-D Sensor,” Proc. of SICE Annual Conf., pp. 614-618, 2012.
- [3] Q. Li et al., “How do you breathe – a non-contact monitoring method using depth data,” Proc. of 2017 IEEE 19th Int. Conf. on e-Health Networking, Applications and Services (Healthcom), pp. 1-6, 2017.
- [4] N. Bernacchia et al., “Non contact measurement of heart and respiration rates based on Kinect,” Proc. of 2014 IEEE Int. Symp. on Medical Measurements and Applications (MeMeA), pp. 1-5, 2014.
- [5] Y. Matsuura et al., “Screening sleep disordered breathing with noncontact measurement in a clinical site,” J. Robot. Mechatron., Vol.29, No.2, pp. 327-337, 2017.
- [6] F. Deng et al., “Design and implementation of a noncontact sleep monitoring system using infrared cameras and motion sensor,” IEEE Trans. on Instrumentation and Measurement, Vol.67, No.7, pp. 1555-1563, 2018.
- [7] H. Aoki et al., “Basic study on non-contact respiration measurement during exercise tolerance test by using Kinect sensor,” Proc. of IEEE/SICE Int. Symp. on System Integration, pp. 217-222, 2015.
- [8] J. Satake et al., “Development of respiration measuring robot,” J. Robot. Mechatron., Vol.31, No.5, pp. 715-718, 2019.
- [9] X. Kong et al., “Three-states-transition method for fall detection algorithm using depth image,” J. Robot. Mechatron., Vol.31, No.1, pp. 88-94, 2019.
- [10] Z. Cao et al., “Realtime multi-person 2D pose estimation using part affinity fields,” Proc. of IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), pp. 7291-7299, 2017.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.