Paper:
Model Predictive Leg Configuration Control for Leg/Wheel Mobile Robots that Adapts to Changes in Ground Level
Naoki Takahashi and Kenichiro Nonaka
Tokyo City University
1-28-1 Tamazutsumi, Setagaya-ku, Tokyo 158-8557, Japan

Leg/wheel mobile robots, which have articulated legs ending in a wheel, can walk on legs as well as drive on wheels by switching between those two motive mechanisms in response to the terrain. However, effective control of the redundant degrees of freedom of leg/wheel mobile robots is complex. In this study, we propose a model predictive controller for leg configuration control that achieves both driving along the ground surface and climbing over a step. The proposed method simultaneously optimizes the robot pose, wheel positions, and joint angles. To consider the kinematic configuration of the legs explicitly, we formulate constraints on the relative position between the body and wheels. The ground contact condition of the wheels is approximately expressed as a continuous function with respect to each wheel’s relative position to the ground. This formulation induces smooth lifting of the wheels when the ground level abruptly changes, as when climbing a step. To prevent overturning, we evaluate the load distribution between each grounded wheel and constrain the body position to form a support polygon consisting of the grounded wheels. We conducted numerical simulations to verify that the proposed method achieves both driving on wheels and climbing over a step.
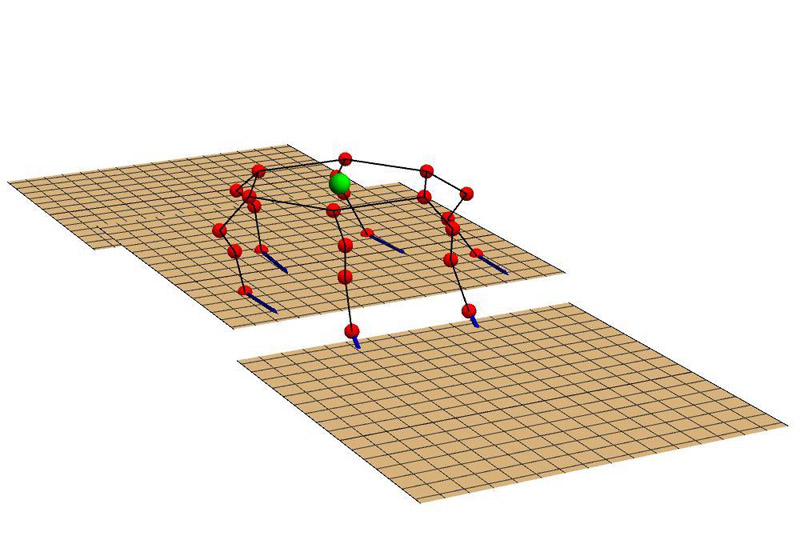
Leg-wheeled mobile robot overcomes uneven terrain using model predictive control
- [1] G. Endo and S. Hirose, “Study on Roller-Walker – Multi-mode Steering Control and Self-Contained Locomotion –,” J. Robot. Mechatron., Vol.12, No.5, pp. 559-566, 2000.
- [2] M. Phlernjai and P. Ratsamee, “Multi-Legged Inspection Robot with Twist-Based Crouching and Fine Adjustment Mechanism,” J. Robot. Mechatron., Vol.34, No.3, pp. 588-598, 2022.
- [3] C. Grand, F. Benamar, F. Plumet, and P. Bidaud, “Stability and traction optimization of a reconfigurable wheel-legged robot,” The Int. J. of Robotics Research, Vol.23, No.10-11, pp. 1041-1058, 2004.
- [4] S. Morimura, S. Nakajima, and E. Nakano, “Adaptive gait for large rough terrain of a leg-wheel robot (6th report, gait for an upward step on slope),” Trans. of the Japan Society of Mechanical Engineers, Part C, Vol.73, No.8, pp. 2287-2294, 2007.
- [5] A. K. Bouloubasis and G. T. McKee, “The mobility system of the Multi-Tasking Rover (MTR),” Proc. 2007 IEEE Int. Conf. on Robotics and Automation, pp. 4919-4924, 2007.
- [6] T. Yoshioka, T. Takubo, T. Arai, and K. Inoue, “Hybrid Locomotion of Leg-Wheel ASTERISK H,” J. Robot. Mechatron., Vol.20, No.3, pp. 403-412, 2008.
- [7] B. H. Wilcox, “ATHLETE: A cargo and habitat transporter for the moon,” 2009 IEEE Aerospace Conf., pp. 1-7, 2009.
- [8] T. Thomson, I. Sharf, and B. Beckman, “Kinematic control and posture optimization of a redundantly actuated quadruped robot,” 2012 IEEE Int. Conf. on Robotics and Automation, pp. 1895-1900, 2012.
- [9] M. Bjelonic, C. D. Bellicoso, Y. de Viragh, D. Sako, F. D. Tresoldi, F. Jenelten, and M. Hutter, “Keep rollin’ – whole-body motion control and planning for wheeled quadrupedal robots,” IEEE Robotics and Automation Letters, Vol.4, No.2, pp. 2116-2123, 2019.
- [10] C. Grand, F. Benamar, and F. Plumet, “Motion kinematics analysis of wheeled-legged rover over 3D surface with posture adaptation,” Mechanism and Machine Theory, Vol.45, No.3, pp. 477-495, 2010.
- [11] W. Reid, F. J. Perez-Grau, A. H. Goktogan, and S. Sukkarieh, “Actively articulated suspension for a wheel-on-leg rover operating on a Martian analog surface,” 2016 IEEE Int. Conf. on Robotics and Automation (ICRA), Vol.2016-June, pp. 5596-5602, 2016.
- [12] K. Nagano and Y. Fujimoto, “Simplification of motion generation in the singular configuration of a wheel-legged mobile robot,” IEEJ J. of Industry Applications, Vol.8, No.5, pp. 745-755, 2019.
- [13] S. An, Y. Oh, and D. Kwon, “Zero-moment point based balance control of leg-wheel hybrid structures with inequality constraints of kinodynamic behavior,” 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2471-2477, 2012.
- [14] Y. Morihiro, N. Takahashi, K. Nonaka, and K. Sekiguchi, “Model predictive load distribution control for leg/wheel mobile robots on rough terrain,” IFAC-PapersOnLine, Vol.51, No.22, pp. 441-446, 12th IFAC Symposium on Robot Control (SYROCO 2018), 2018.
- [15] V. Tsounis, M. Alge, J. Lee, F. Farshidian, and M. Hutter, “DeepGait: Planning and Control of Quadrupedal Gaits Using Deep Reinforcement Learning,” IEEE Robotics and Automation Letters, Vol.5, No.2, pp. 3699-3706, 2020.
- [16] M. Rutschmann, B. Satzinger, M. Byl, and K. Byl, “Nonlinear model predictive control for rough-terrain robot hopping,” 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1859-1864, 2012.
- [17] K. Alexis, G. Nikolakopoulos, and A. Tzes, “Switching model predictive attitude control for a quadrotor helicopter subject to atmospheric disturbances,” Control Engineering Practice, No.10, pp. 1195-1207, 2011.
- [18] M. Defoort, A. Kokosy, T. Floquet, W. Perruquetti, and J. Palos, “Motion planning for cooperative unicycle-type mobile robots with limited sensing ranges: A distributed receding horizon approach,” Robotics and Autonomous Systems, Vol.57, No.11, pp. 1094-1106, 2009.
- [19] J. Di Carlo, P. M. Wensing, B. Katz, G. Bledt, and S. Kim, “Dynamic Locomotion in the MIT Cheetah 3 Through Convex Model-Predictive Control,” IEEE Int. Conf. on Intelligent Robots and Systems, pp. 7440-7447, 2018.
- [20] D. Dimitrov, P. B. Wieber, H. J. Ferreau, and M. Diehl, “On the implementation of model predictive control for on-line walking pattern generation,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 2685-2690, 2008.
- [21] G. Franz and W. Lucia, “A Receding Horizon Control Strategy for Autonomous Vehicles in Dynamic Environments,” IEEE Trans. Contr. Syst. Technol., Vol.24, No.2, pp. 695-702, 2016.
- [22] J. Mattingley, Y. Wang, and S. Boyd, “Receding Horizon Control: Automatic generation of high-speed solvers,” IEEE Control Syst. Mag., Vol.31, No.3, pp. 52-65, 2011.
- [23] Y. Wang and S. Boyd, “Fast model predictive control using online optimization,” IEEE Trans. Contr. Syst. Technol., Vol.18, No.2, pp. 267-278, 2010.
- [24] T. Ohtsuka, “A continuation/GMRES method for fast computation of nonlinear receding horizon control,” Automatica, Vol.40, No.4, pp. 563-574, 2004.
- [25] L. Stella, A. Themelis, P. Sopasakis, and P. Patrinos, “A simple and efficient algorithm for nonlinear model predictive control,” 2017 IEEE 56th Annual Conf. on Decision and Control (CDC), pp. 1939-1944, 2017.
- [26] B. Houska, H. J. Ferreau, and M. Diehl, “An auto-generated real-time iteration algorithm for nonlinear mpc in the microsecond range,” Automatica, Vol.47, No.10, pp. 2279-2285, 2011.
- [27] I. Okawa and K. Nonaka, “Linear complementarity model predictive control with limited iterations for box-constrained problems,” Automatica, Vol.125, Article No.109429, 2021.
- [28] S. G. Vougioukas, “Reactive trajectory tracking for mobile robots based on non linear model predictive control,” Proc. 2007 IEEE Int. Conf. on Robotics and Automation, pp. 3074-3079, 2007.
- [29] C. E. Beal and J. C. Gerdes, “Model predictive control for vehicle stabilization at the limits of handling,” IEEE Trans. Contr. Syst. Technol., Vol.21, No.4, pp. 1258-1269, 2013.
- [30] N. Takahashi, N. Shibata, and K. Nonaka, “Optimal configuration control of planar leg/wheel mobile robots for flexible obstacle avoidance,” Control Engineering Practice, Vol.101, Article No.104503, 2020.
- [31] M. Bjelonic, R. Grandia, O. Harley, C. Galliard, S. Zimmermann, and M. Hutter, “Whole-Body MPC and Online Gait Sequence Generation for Wheeled-Legged Robots,” IEEE Int. Conf. on Intelligent Robots and Systems, pp. 8388-8395, 2021.
- [32] N. Takahashi and K. Nonaka, “Model predictive obstacle avoidance control for leg/wheel mobile robots with optimized articulated leg configuration,” 2012 IEEE 51st IEEE Conf. on Decision and Control (CDC), pp. 1782-1789, 2012.
- [33] N. Takahashi and K. Nonaka, “Model Predictive Obstacle Avoidance and Wheel Allocation Control of Mobile Robots Using Embedded CPU,” J. of System Design and Dynamics, Vol.6, No.4, pp. 447-465, 2012.
- [34] H. Tsubaki and G. Ishigami, “Experimental study on wheel-soil interaction mechanics using in-wheel sensor and particle image velocimetry Part I: Analysis and modeling of normal stress of lightweight wheeled vehicles,” J. of Terramechanics, Vol.93, pp. 23-39, 2021.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.