Paper:
Method of Studying a Process of Turning in an Orthotic Robot
Mateusz Janowski, Danuta Jasińska-Choromańska, and Marcin Zaczyk
Institute of Micromechanics and Photonics, Faculty of Mechatronics, Warsaw University of Technology
Św. Andrzeja, Boboli 8, Warsaw 02-525, Poland

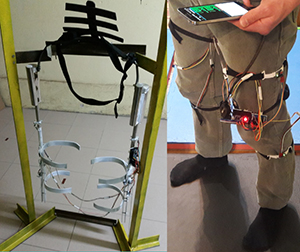
This paper analyzes an orthotic robot’s capability of changing the direction of motion as part of its gait process while it is being worn by a user. Exoskeletons and orthotic robots are presented, focusing on their capabilities regarding the implementing a turn of their lower limbs. The devices are analyzed, and a method is proposed, being safe for the user, which ensures the required change of the angular position of the user’s trunk, having performed a turn of the device. The smallest movement of each lower limb, which is necessary to enable a turn of the trunk in such a way that the turn can be performed by both lower limbs, is determined.
Motion correlation of 6dof exoskeletons
- [1] C. R. Sarah, M. J. Nandor, and L. Lu, “A muscle-driven approach to restore stepping with an exoskeleton for individuals with paraplegia,” J. of NeuroEngineering and Rehabilitation, Vol.14, 2017.
- [2] W. Choromański, “Ekomobilność,” Wydawnictwo Komunikacji i Łaczności Warszawa, pp. 178-185, 2015.
- [3] K. Bagiński, D. Jasińska-Choromańska, and J. Wierciak, “Modelling and simulation of a system for verticalization and aiding the motion of individuals suffering from paresis of the lower limbs,” Bulletin of the Polish Academy of Sciences, Vol.61, No.4 pp. 919-927, 2013.
- [4] R. Bogue, “Exoskeletons and robotic prosthetics: a review of recent developments,” Industrial Robot: An Int. J., Vol.36, Issue 5, pp. 421-427, 2009.
- [5] G. Chen, C. K. Chan, Z. Guo, and H. Yu, “A review of lower extremity assistive robotic exoskeletons in rehabilitation therapy,” Crit. Rev. Biomed. Eng., No.41, pp. 343-363, 2013.
- [6] D. Jasińska-Choromańska, K. Szykiedans, J. Wierciak, D. Kołodziej, M. Zaczyk, K. Bagiński, M. Bojarski, and B. Kabziński, “Mechatronic system for verticalization and aiding the motion of the disabled,” Bulletin of the Polish Academy of Sciences, Vol.61, No.2, pp. 419-431, 2013.
- [7] M. J. Hall, M. P. H. S. Levant, and C. J. DeFrances, “Centers for Disease Control and Prevention,” Hospitalization for Stroke in U.S. Hospitals, pp. 1989-2009, 2012.
- [8] N. D’Elia, F. Venetti, and M. Cempini, “Physical human-robot interaction of an active pelvis orthosis: toward ergonomic assessment of wearable robots,” J. of Neuroengineering and Rehabilitation, Vol.14, 2017.
- [9] Y. Tingfang, M. Cempini, C. M. Oddo, and N. Vitiello, “Review of assistive strategies in power elbow-limb orthoses and exoskeletons,” Robotics and Autonomous Systems, Vol.64, pp. 120-136, 2015.
- [10] Y. Matsumoto, M. Seki, T. Ando, Y. Kobayashi, Y. Nakashima, H. Iijima, M. Nagaoka, and M. G. Fujie, “Development of an Exoskeleton to Support Eating Movements in Patients with Essential Tremor,” J. Robot. Mechatron., Vol.25, No.6, pp. 949-958, 2013.
- [11] M. Zaczyk, D. Ośiński, and D. Jasińska-Choromańska, “Hip Articulation in Orthotic Robot,” Recent Global Research and Education: Technological Challenges, Advances in Intelligent Systems and Computing, Vol.519, pp. 419-423, 2017.
- [12] T. Kosaki and S. Li, “A Water-Hydraulic Upper-Limb Assistive Exoskeleton System with Displacement Estimation,” J. Robot. Mechatron., Vol.32, No.1, pp. 149-156, 2020.
- [13] M. Janowski, D. Jasińska-Choromańska, D. Osiński, and M. Zaczyk, “Universal compact lower limb turning module intended for use in orthotic robots,” Proc. of the Conf. MMS 2017, pp. 1-10, 2018.
- [14] D. Osiński, M. Zaczyk, and D. Jasińska-Choromańska, “Conception of Turning Module for Orthotic Robot,” Advanced Mechatronics Solutions, Advances in Intelligent Systems and Computing, pp. 147-152, 2016.
- [15] D. Osiński and D. Jasińska-Choromańska, “Kinematic structure of turning modules in orthotic robots,” Procedia Enginiering, Vol.177, Proc. XXI Polish-Slovak Scientific Conf., pp. 450-454, 2017.
- [16] D. Osiński and D. Jasińska-Choromańska, “Parametric Model of Human Body for Orthotic Robot Simulation Study,” Advances in Intelligent Systems and Computing, Vol.644, pp. 380-386, 2018.
- [17] T. Ando, M. Watanabe, K. Nishimoto, Y. Matsumoto, M. Seki, and M. G. Fujie, “Myoelectric-Controlled Exoskeletal Elbow Robot to Suppress Essential Tremor: Extraction of Elbow Flexion Movement Using STFTs and TDNN,” J. Robot. Mechatron., Vol.24, No.1, pp. 141-149, 2012.
- [18] P. Sale, M. Franceschini, A. Waldner, and S. Hesse, “Use of the robot assisted gait therapy in rehabilitation of patients with stroke and spinal cord injury,” Eur. J. Phys. Rehabil. Med., No.48, pp. 111-121, 2012.
- [19] Y. Muramatsu, H. Kobayashi, Y. Sato, H. Jiaou, T. Hashimoto, and H. Kobayashi, “Quantitative Performance Analysis of Exoskeleton Augmenting Devices – Muscle Suit – for Manual Worker,” Int. J. Automation Technol., Vol.5, No.4, pp. 599-567, 2011.
- [20] K. A. Strausser and H. Kazerooni, “The Development and Testing of a Human Machine Interface for a Mobile Medical Exoskeleton,” Int. Conf. on Intelligent Robots and Systems, pp. 4911-4916, 2011.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.