Paper:
Self-Localization of Mobile Robot Based on Beacon Beam of TOF Laser Sensor Mounted on Pan-Tilt Actuator: Estimation Method that Combines Spot Coordinates on Laser Receiver and Odometry
Ryoji Miura, Daichi Usagawa, Keigo Noguchi, Satoshi Iwaki, and Tetsushi Ikeda
Hiroshima City University
3-4-1 Ozukahigashi, Asaminami, Hiroshima City, Hiroshima 731-3194, Japan

We propose a method for estimating the position and attitude of a mobile robot using a laser beam. To this end, we employ the real-world clicker, which was developed by the authors and consisted of a system that uses a TOF (time of flight) laser sensor mounted on a pan-tilt actuator to measure the three-dimensional position of the laser spot. A laser receiver was mounted on top of the mobile robot, and the position of the laser spot was measured by both the camera installed below the receiver and real-world clicker. We propose an algorithm that allows the estimation of the robot’s self-position and attitude while the robot is in motion by combining the use of odometry, and validate it through simulations and experiments.
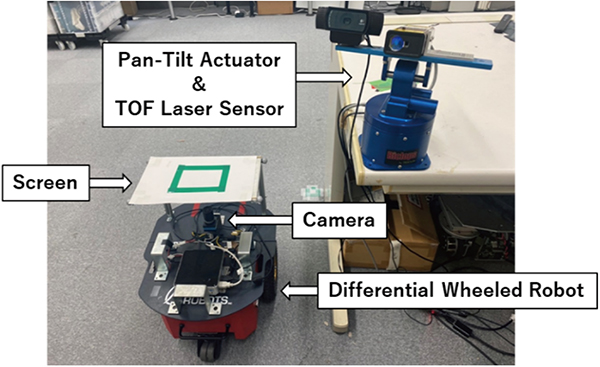
Robot and setup used in experiment
- [1] K. Kleeberger and M. F. Huber, “Single shot 6D object pose estimation,” IEEE Int. Conf. on Robotics and Automation (ICRA), May 31 to June 4, Paris, France, 2020.
- [2] J. Tremblay, T. To, B. Sundaralingam, Y. Xiang, D. Fox, and S. Birchfield, “Deep object pose estimation for semantic robotic grasping of household objects,” Conf. on Robot Learning (CoRL), October 29-31, Zürich, 2018.
- [3] Z. Dong, S. Liu, T. Zhou, H. Cheng, L. Zeng, X. Yu, and H. Liu, “PPR-Net: point-wise pose regression network for instance segmentation and 6D pose estimation in bin-picking scenarios,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), November 4-8, Macau, China, 2019.
- [4] Y. Abiko, Y. Hidaka, K. Sato, S. Iwaki, and T. Ikeda, “Real World Click with a TOF Laser Sensor Set on a Pan-tilt Actuator and Its Application for Teaching a Life Support Robot,” Trans. of the Society of Instrument and Control Engineers, Vol.52, No.11, pp. 614-624, doi: 10.9746/sicetr.52.614, 2016.
- [5] K. Sato, Y. Hidaka, S. Iwaki, and T. Ikeda, “Pointing Performance Improvement of Real World Clicker System with a TOF Laser Sensor Set on a Pan-tilt Actuator – Proposal of Laser Spot Marker in the Viewing Window –,” Trans. of the Society of Instrument and Control Engineers, Vol.54, No.2, pp. 290-297, doi: 10.9746/sicetr.54.290, 2018.
- [6] S. Fukui et al., “Object Grasping Instructions to Support Robot by Laser Beam One Drag Operations,” J. Robot. Mechatron., Vol.33, No.4, pp. 756-767, doi: 10.20965/jrm.2021.p0756, 2021.
- [7] T. Tumura, N. Fujiwara, M. Hashimoto, and T. Tang, “A New Method of Vehicle Position and Heading Measurement by use of a Laser-Beacon,” J. of the Robotics Society of Japan, Vol.2, No.6, pp. 557-565, 1984.
- [8] T. Tumura, N. Fujiwara, and M. Hashimoto, “A Method of Position and Heading Measurements for Vehicle Travelling on Two-Dimensional Space Using Laser and Corner Cubes,” Systems and Controls, Vol.29, No.8, pp. 553-560, 1985.
- [9] M. Hashimoto, F. Oba, Y. Fujikawa, K. Imamaki, and T. Nishida, “Position Estimation Method for Wheeled Mobile Robot by Integrating Laser Navigation and Dead Reckoning Systems,” J. of the Robotics Society of Japan, Vol.11, No.7, pp. 1028-1038, 1993.
- [10] M. Hashimoto, N. Matsuo, and F. Oba, “3D Positioning Method for Mobile Robot Using Laser and Tilting Reflectors,” Trans. of the Japan Society of Mechanical Engineers, C, Vol.68, No.665, pp. 173-180, 2002.
- [11] K. Tanaka, M. Kajitani, C. Kanamori, and Y. Abe, “Development of a Construction Robot for Marking on Ceiling Boards (3rd Report, Prototype of the Laser Pointer System),” Trans. of the Japan Society of Mechanical Engineers, C, Vol.69, No.679, pp. 676-682, 2003.
- [12] K. Hara, S. Maeyama, and Y. Tanaka, “Mobile Robot Navigation Using Trajectory of Laser Spot,” Trans. of the Japan Society of Mechanical Engineers, C, Vol.74, No.738, pp. 353-358, 2008.
- [13] S. Thrun, W. Burgard, and D. Fox, “Probabilistic Robotics,” The MIT Press, Cambridge, 2005.
- [14] M. Tomonou and Y. Hara, “Current and Future Directions in SLAM,” Systems, Control and Information, Vol.64, No.2, pp. 45-50, 2020.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.