Paper:
Development of a Real-Time Simulator for a Semi-Autonomous Tele-Robot in an Unknown Narrow Path
Nattawat Pinrath and Nobuto Matsuhira
Faculty of Functional Control Systems, Shibaura Institute of Technology
3-7-5 Toyusu, Kotu-ku, Tokyo 135-8548, Japan

This study proposes a teleoperation system for assistive controlling of the movement of a mobile robot in a narrow path. The teleoperation system is created by combining data from real and virtual devices. In CoppeliaSim we applied the Braitenberg algorithm and the open motion planning library module (OMPL). The Braitenberg algorithm is a sensor-based automatic motion designed to aid the robot operator in maneuvering through the narrow path. While the OMPL is used to create a path for the operator to control the robot in narrow paths or intersections within a narrow path, the simulation uses a virtual proximity sensor to fulfill the Braitenberg algorithm requirement. With dynamic simulation a laser rangefinder obtains the environmental data and displays it on the simulation screen. The simulation scene is subjected to the virtual proximity sensor and the Braitenberg algorithm is applied to the simulation scene. Afterward, simulation scripts are written to incorporate the linear and angular velocities into a robot operating system for real-time robot control. The results showed that the system was capable of combining real-time dynamic simulation with the real world. Furthermore, the proposed system could aid the operator in narrow path environments while avoiding collision.
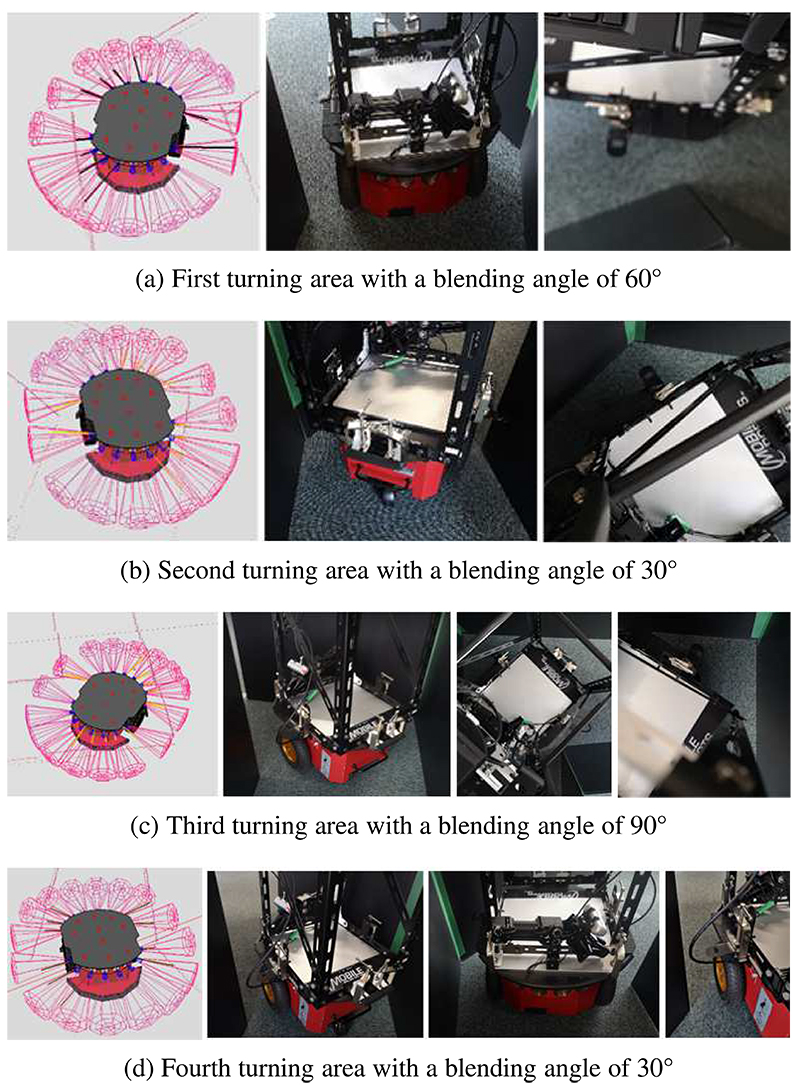
Comparing the simulation scene with the real robot scene
- [1] C. W. Nielsen, M. A. Goodrich, and R. W. Ricks, “Ecological interfaces for improving mobile robot teleoperation,” Proc. IEEE Trans. on Robotics, Vol.23, No.5, pp. 927-941, 2007.
- [2] D. Saakes et al., “A teleoperating interface for ground vehicles using autonomous flying cameras,” Proc. 23rd Int. Conf. on Artificial Reality and Telexistence (ICAT), pp. 13-19, 2013.
- [3] H. A. Yanco, J. L. Drury, and J. Scholtz, “Beyond usability evaluation: Analysis of human-robot interaction at a major robotics competition,” J. Human-Computer Interaction, Vol.19, No.1-2, pp. 117-149, 2004.
- [4] Z. Du et al., “Experimental evaluation of a tele-operated robot system in traversing a narrow path,” Proc. 2018 IEEE Int. Conf. on Mechatronics and Automation (ICMA), pp. 821-826, 2018.
- [5] J. Casper and R. R. Murphy, “Human-robot interactions during the robot assisted urban search and rescue response at the world trade center,” IEEE Trans. on Systems, Man, and Cybernetics, Vol.33, No.3, pp. 367-385, Jun. 2003.
- [6] J. L. Burke, R. R. Murphy, M. D. Coovert, and D. L. Riddle, “Moonlight in Miami: A field study of human-robot interaction in the context of an urban search and rescue disaster response training exercise,” Human-Computer Interaction, Vol.19, pp. 85-116, 2004.
- [7] J. L. Burke, R. R. Murphy, E. Rogers, V. J. Lumelsky, and J. Scholtz, “Final report for the DARPA/NSF interdisciplinary study on human-robot interaction,” IEEE Trans. on System, Man, and Cybernetics, Vol.34, No.2, p. 103112, May 2004.
- [8] R. R. Murphy, “Humans, robots, rubble, and research,” Interactions, Vol.12, No.2, pp. 37-39, Mar./Apr. 2005.
- [9] A. A. Nofi, “Defining and measuring shared situation awareness,” Center Naval Anal, Alexandria, VA, Tech. Rep. CRM D0002895, Nov. 2000.
- [10] B. P. DeJong, J. Colgate, and M. A. Peshkin, “Improving teleoperation: Reducing mental rotations and translations,” Proc. IEEE Int. Conf., Autom., New Orleans, LA, Apr. 2004.
- [11] J. Scholtz, “Human-robot interactions: Creating synergistic cyber forces,” The 2002 NRL Workshop Multirobot Syst., Washington DC, 2002.
- [12] T. Kot and P. Novák, “Application of virtual reality in teleoperation of the military mobile robotic system TAROS,” J. of Advanced Robotic Systems, Vol.15, No.1, 2018.
- [13] S. Iba, J. Weghe, C. Paredis, and P. Khosla, “An architecture for gesture based control of mobile robots,” Proc. IEEE/RSJ Int. Conf. Intellectual Robots System, Gyeongju, Korea, pp. 851-857, Oct. 1999.
- [14] Z. Pietrzykowski “Ship’s fuzzy domain-a criterion for navigational safety in narrow fairways,” The J. of Navigation, Vol.61, No.3, pp. 499-514, 2008.
- [15] C. Shi, M. Zhang, and J. Peng, “Harmonic potential field method for autonomous ship navigation,” Proc. 2007 7th Int. Conf. on ITS Telecommunications, pp. 1-6, 2007.
- [16] D. Kiss and D. Papp, “Effective navigation in narrow areas: A planning method for autonomous cars,” Proc. 15th Int. Symposium on Applied Machine Intelligence and Informatics (SAMI), pp. 423-430, 2017.
- [17] F.-A. Moreno et al., “Automatic waypoint Generation to improve robot navigation through narrow spaces,” Sensors, Vol.20, No.1, p. 240, 2020.
- [18] C. Wang et al., “Autonomous mobile robot navigation in uneven and unstructured indoor environments,” Proc. 2017 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 109-116, 2017.
- [19] I. Farkhatdinov, J.-H. Ryu, and J. An, “A preliminary experimental study on haptic teleoperation of mobile robot with variable force feedback gain,” Proc. 2010 IEEE Haptics Symposium, pp. 251-256, 2010.
- [20] S. Hughes et al., “Camera control and decoupled motion for teleoperation,” Proc. 2003 IEEE Int. Conf. on Systems, Man, and Cybernetics (SMC’03), Conf. Theme: System Security and Assurance (Cat. No.03CH37483), Vol.2. 2003.
- [21] B. Keyes, R. Casey, H. Yanco, B. Maxwell, and Y. Georgiev, “Camera placement and multi-camera fusion for remote robot operation,” Proc. IEEE Int. Workshop on Safety, Security and Rescue Robotics, pp. 22-24, 2006.
- [22] M. Sokolov, O. Bulichev, and I. Afanasyev, “Analysis of ROS-based visual and lidar odometry for a teleoperated crawler-type Robot in indoor Environment,” Proc. ICINCO, pp. 316-321, 2017.
- [23] M. Sokolov, O. Bulichev, and I. Afanasyev, “Aerial ground collaborative sensing: third-Person view for teleoperation,” Proc. 2018 IEEE Int. Symposium on Safety, Security, and Rescue Robotics (SSRR), pp. 1-7, 2018.
- [24] J. D. Lee, B. Caven, S. Haake, and T. L. Brown, “Speech-based interaction with in-vehicle computers: The effect of speech-based email on driver’s attention to the roadway,” Human Factors, Vol.43, No.4, pp. 631-640, 2001.
- [25] S. Waldherr, R. Romero, and S. Thrun, “A gesture based interface for human-robot interaction,” Autonomous Robots, Vol.9, No.2, pp. 151-173, 2000.
- [26] N. Diolaiti and C. Meichiorri, “Teleoperation of a mobile robot through haptic feedback,” Proc. IEEE Interface Workshop Haptic Virtual Environ. Appl., Ottawa, On, Canada, pp. 67-72, Nov. 2002.
- [27] V. Kulyukin, C. Gharpure, and C. Pentico, “Robots as interfaces to haptic and locomotor spaces,” Proc. Acadenic Medicine/IEEE Int. Conf. Hum.-Robot Interact., Arlington, VA, pp. 325-331. 2007.
- [28] S. Lee, G. S. Sukhatme, G. J. Kim, and C.-M. Park, “Haptic control of a mobile robot,” Proc. IEEE/RSJ Int. Conf. Intellectual Robots System, Lausanne, Switzerland, pp. 2867-2874, 2002.
- [29] L. Yu, P. Tsui, Q. Zhou, and H. Hu, “A web-based telerobotic system for research and education at Essex,” Proc. IEEE/ASME Int. Conf. Adv. Intell. Mechatron., Como, Italy, Jul. 2001.
- [30] D. Schulz, W. Burgard, D. Fox, S. Thrun, and A. Creemers, “Web interfaces for mobile robots in public places,” IEEE Robotics and Automation Magazine, Vol.7, No.1, pp. 48-56, Mar. 2000.
- [31] M. Skubic et al., “Spatial language for human-robot dialogs,” IEEE Trans. on Systems, Vol.34, No.2, pp. 154-167, May 2004.
- [32] G. Chronis and M. Skubic, “Robot navigation using qualitative landmark states from sketched route maps,” Proc. of the IEEE Int. Conf. Robotic Automation, New Orleans, LA, pp. 1530-1535, 2004.
- [33] H. A. Yanco and J. L. Drury, ““Where am I?” Acquiring situation awareness using a remote robot platform,” Proc. IEEE Conf. System, Man, and, Cybernetics, Vol.3, pp. 2835-2840, Oct. 2004.
- [34] J. L. Drury, J. Scholtz, and H. A. Yanco, “Awareness in human-robot interactions,” Proc. IEEE Int. Conf. System, Man, Cybern., Washington, DC, Oct. 2003.
- [35] P. Scerri, D. Pynadath, and M. Tambe, “Adjustable autonomy in real-world multi-agent environments,” Proc. the Fifth Int. Conf. on Autonomous Agents, pp. 300-307, 2001.
- [36] J. M. Bradshaw et al., “Adjustable autonomy and human-agent teamwork in practice: An interim report on space applications,” Agent Autonomy, pp. 243-280, 2003.
- [37] N. Diolaiti and C. Melchiorri, “Teleoperation of a mobile robot through haptic feedback,” IEEE Int. Workshop Have Haptic Virtual Environments and Their Applications , pp. 67-72, 2002.
- [38] T. W. Fong et al., “Novel interfaces for remote driving: Gesture, haptic, and PDA: Mobile Robots XV and Telemanipulator and Telepresence Technologies VII,” Int. Society for Optics and Photonics, pp. 300-311, 2001.
- [39] X. Yang, R. V. Patel, and M. Moallem, “A fuzzy-braitenberg navigation strategy for differential drive mobile robots,” J. of Intelligent and Robotic Systems, Vol.47, No.2, pp. 101-124, 2006.
- [40] G. Wyeth, “Training a vision guided mobile robot,” Autonomous Robots, Vol.5, No.3, pp. 381-394, 1998.
- [41] Y. Matsumoto et al., “A study on autonomous entering into narrow path using a mobile robot,” 3rd Int. Conf. on Information Technology Research (ICITR), pp. 1-4, 2018.
- [42] Z. Xiang, V. Santos, and J. Liu, “Locating and Crossing Doors and Narrow Passages for a Mobile Robot,” ICINCO, Vol.2, pp. 370-374, 2004.
- [43] S. Michieletto, D. Zanin, and E. Menegattim, “Nao robot simulation for service robotics proposes,” European Modelling Symposium, pp. 477-482, 2013.
- [44] D. J. Bruemmer et al., “Shared understanding for collaborative control,” IEEE Trans. on Systems, Man, and Cybernetics – Part A: Systems and Humans, Vol.35, No.4, pp. 494-504, 2005.
- [45] M. Baker et al., “Improved interfaces for human-robot interaction in urban search and rescue,” IEEE Int. Conf. on Systems, Man and Cybernetics (IEEE Cat. No.04CH37583), pp. 2960-2965, 2004.
- [46] X. Chen et al., “Robust SLAM system based on monocular vision and LiDAR for robotic urban search and rescue,” IEEE Int. Symposium on Safety, Security and Rescue Robotics (SSRR), pp. 41-47, 2017.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.