Paper:
Development and Application of Silicone Outer Shell-Type Pneumatic Soft Actuators
Yasuhiro Hayakawa*1, Keisuke Kida*2, Yuma Nakanishi*3, Hiroaki Ichii*1, and Yasunobu Hirota*4
*1Department of Control Engineering, National Institute of Technology, Nara College
22 Yata-cho, Yamatokoriyama, Nara 639-1058, Japan
*2Tokupi Co., Ltd.
3-167 Otake, Yao, Osaka 581-0854, Japan
*3Advanced Mechanical Engineering Course, National Institute of Technology, Nara College
22 Yata-cho, Yamatokoriyama, Nara 639-1058, Japan
*4Hishiya Corporation
6-18-5 Tanimachi, Chuo-ku, Osaka, Osaka 542-0012, Japan

Pneumatic soft actuators exhibit both passive flexibility from the casing and active flexibility from pressurizing and depressurizing. These actuators are expected to be human-friendly and are often used in nursing and medical situations because they allow access to soft systems through control of the internal air pressure. The current design of pneumatic soft actuators has two technical points of interest: the control method for the drive direction and the operating pressure level. An actuator that addresses these points is required. In this study, a pneumatic soft actuator with a silicone rubber casing – called a sponge core soft rubber actuator (SCSRA) – is developed to solve these problems. SCSRAs can perform various functions by changing the bonding state of the silicon film. Thus, a large stroke can be achieved in a low-pressure area of ≤ 30 Pa, and the driving system can be controlled by peeling off and bonding the silicon film. We clarified the expansion and stiffness characteristics of the “bonded SCSRA” and “peeled SCSRA” when unpressurized and pressurized and measured the grip strength when walking in shoes with protrusions on the insole and single-tooth sandals with protrusions on the sole as example applications of the sensing ability.
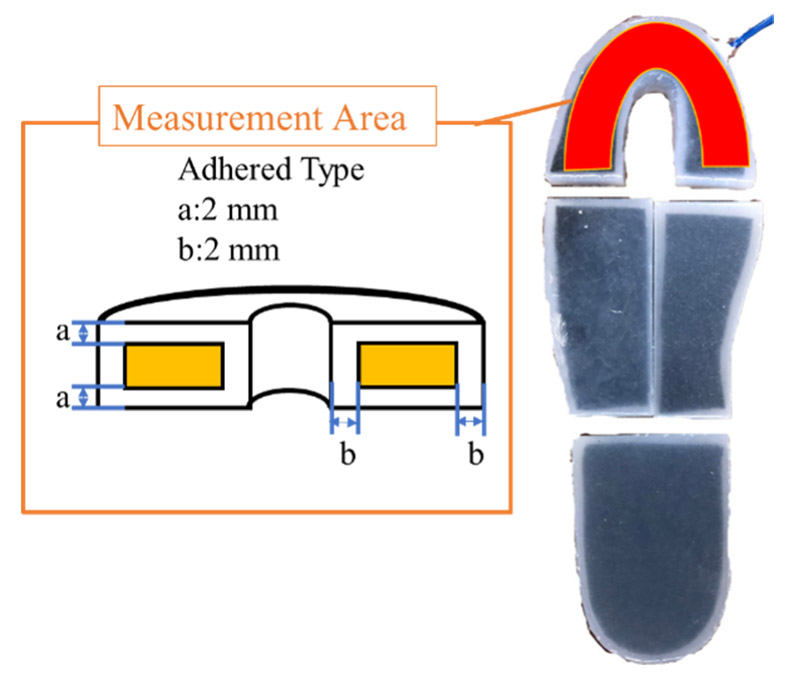
Insoles that can measure gripping force
- [1] D. Arashi, Y. Kakinuma, K. Sugiura, T. Terai, S. Ashizawa, and T. Oomichi, “Research on High Efficiency Operation Method of Linear Generator Engine,” J. Robot. Mechatron., Vol.30, No.1, pp. 93-105, doi: 10.20965/jrm.2018.p0093, 2018.
- [2] Y. Matsui, D. Hosomi, and M. Takaiwa, “Development of Finger-Wrist Rehabilitation Device Using Pneumatically Driven Parallel Sticks,” J. Robot. Mechatron., Vol.32, No.5, pp. 1044-1051, doi: 10.20965/jrm.2020.p1044, 2020.
- [3] M. N. Ribuan, S. Wakimoto, K. Suzumori, and T. Kanda, “Omnidirectional Soft Robot Platform with Flexible Actuators for Medical Assistive Device,” Int. J. Automation Technol., Vol.10, No.4, pp. 494-502, doi: 10.20965/ijat.2016.p0494, 2016.
- [4] T. Noritsugu, “Pneumatic Soft Actuator and Human Friendly Mechanism,” J. of the Robotics Society of Japan, Vol.21, No.7, pp. 722-726, 2003 (in Japanese).
- [5] B. Gorissen, M. De Volder, A. De Greef, and D. Reynaerts, “Theoretical and experimental analysis of pneumatic balloon microactuators,” Sensors and Actuators A: Physical, Vol.168, pp. 58-65, 2011.
- [6] S. Konishi, S. Sawano, S. Kusuda, and T. Sakakibara, “Fluid-Resistive Bending Sensor Compatible with a Flexible Pneumatic Balloon Actuator,” J. Robot. Mechatron., Vol.20, No.3, pp. 436-440, doi: 10.20965/jrm.2008.p0436, 2008.
- [7] B. Gorissen, T. Chiskiro, S. Shimomura, D. Reynaerts, M. De Volder, and S. Konishi, “Flexible pneumatic twisting actuators and their application to tilting micromirrors,” Sensors and Actuators A: Physical, Vol.216, pp. 426-431, 2014.
- [8] S. Kawamura et al., “Control actuator basics,” pp. 49-50, Corona Publishing Co., Ltd., 2014.
- [9] K. Suzumori, “Flexible Microactuator,” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.55, No.518, pp. 2574-2552, 1989 (in Japanese).
- [10] D. Sasaki, T. Noritsugu, and M. Takaiwa, “Development of Active Support Splint Driven by Pneumatic Soft Actuator (ASSIST),” J. Robot. Mechatron., Vol.16, No.5, pp. 497-503, doi: 10.20965/jrm.2004.p0497, 2004.
- [11] T. Noritsugu, D. Sasaki, M. Kameda, A. Fukunaga, and M. Takaiwa, “Wearable Power Assist Device for Standing Up Motion Using Pneumatic Rubber Artificial Muscles,” J. Robot. Mechatron., Vol.19, No.6, pp. 619-628, doi: 10.20965/jrm.2007.p0619, 2007.
- [12] M. F. Antwi-Afari, H. Li, J. Seo, and A. Y. L. Wong, “Wearable insole pressure system for automated detection and classification of awkward working postures in construction workers,” Automation in Construction, Vol.96, pp. 433-441, 2018.
- [13] S.-S. Lee, S. T. Cho, and S.-I. Choi, “Classification of Gait Type Based on Deep Learning Using Various Sensors with Smart Insole,” Sensors, Vol.19, No.8, 2019.
- [14] A. B. Putti, G. P. Arnold, L. Cochrane, and R. J. Abboud, “The Pedar® in-shoe system: Repeatability and normal pressure values,” Gait & Posture, Vol.25, pp. 401-405, 2007.
- [15] S. W. Park, P. S. Das, and J. Y. Park, “Development of wearable and flexible insole type capacitive pressure sensor for continuous gait signal analysis,” Organic Electronics, Vol.53, pp. 213-220, 2018.
- [16] Y. Hayakawa, Y. Kimata, and K. Kida, “Study on Human Behavior Classification by using High-Performance Shoes Equipped with Pneumatic Actuators,” J. Robot. Mechatron., Vol.32, No.5, pp. 947-957, doi: 10.20965/jrm.2020.p0947, 2020.
- [17] T. Minamoto and Y. Hayakawa, “Development of a New Rubber Element with Human Compatibility,” Graduation Research of Department of Control Engineering, National Institute of Technology, Nara College, 2020.
- [18] H. Washizuka, M. Kanamori, N. Nagatani, M. Ichimura, and M. Nishitani, “Relationship between toe force or lower limb strength and sense of balance,” Toyama Medical J., Vol.26, No.1, pp. 25-32, 2015 (in Japanese).
- [19] H. Takeshi, “The function of the arch of the foot,” J. of the Keio Medical Society, Vol.81, No.1, pp. 17-21, 2004 (in Japanese).
- [20] S. Sobhani, E. Sinaei, A. Motealleh, F. Hooshyar, N. S. Kashkooli, and A. K. Yoosefinejad, “Combined effects of whole body vibration and unstable shoes on balance measures in older adults: A randomized clinical trial,” Archives of Gerontology and Geriatrics, Vol.78, pp. 30-37, 2018.
- [21] M. Hasegawa, S. Kanai, M. E. Shimizu, K. Shimatani, S. Tanaka, S. Oki, and A. Otsuka, “The influence of footwear on the windlass mechanism and toe movement,” Structure and Function, Vol.5, No.2, pp. 75-80, 2007 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.