Paper:
Development of Self-Powered 5-Finger Pneumatically Driven Hand Prosthesis Using Supination of Forearm
Kotaro Nishikawa*, Kentaro Hirata**, and Masahiro Takaiwa***
*Department of Integrated Science and Technology, National Institute of Technology, Tsuyama College
624-1 Numa, Tsuyama, Okayama 708-8509, Japan
**Graduate School of Natural Science and Technology, Okayama University
3-1-1 Tsushima-naka, Kita-ku, Okayama 700-8530, Japan
***Graduate School of Technology, Industrial and Social Sciences, Tokushima University
2-1 Minamijyousanjima-cho, Tokushima 770-8506, Japan

Recently, myoelectric hand prostheses produced by the combination of 3D-CAD and printer have gained attention. 3D printing of hand prosthesis has resulted in cost reduction. However, when an electric actuator with reduction gears is used as the driving source of the hand prosthesis, the joint rigidity becomes high; therefore, compliance control is required to grasp soft target objects. In this study, we propose a pneumatically driven hand prosthesis using a flexible bellows actuator. The hand prosthesis is lightweight and inexpensive because it is self-powered and generates compressed air through the supination motion of the user’s forearm instead of an external compressor, which is essential for conventional pneumatic systems. Stable flexible grasping of the target object was achieved by driving a five-finger hand using this system.
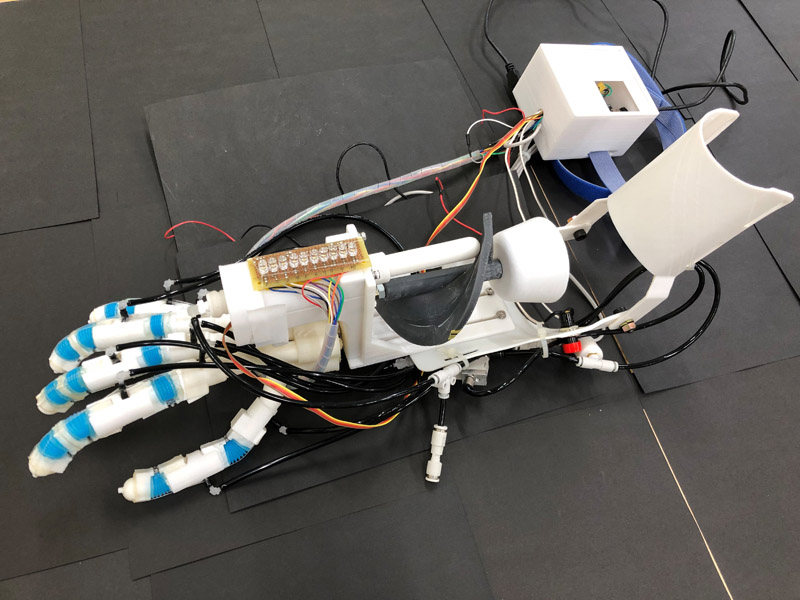
Self-powered hand prosthesis
- [1] H. Kobayashi, “3D Printing Technology and Application: Now and Future,” J. of Printing Science and Technology, Vol.50, No.5, pp. 413-421, 2013 (in Japanese).
- [2] M. Okuno, “3D Digital Technology Initiatives in the Field of Prothesis and Orthosis in Japan,” J. of the Japanese Society of Prosthetics and Orthotics, Vol.36, No.3, pp. 198-199, 2020 (in Japanese).
- [3] Y. Kodama, “3D Digital Technology Initiatives in the Field of Prothesis and Orthosis in France,” J. of the Japanese Society of Prosthetics and Orthotics, Vol.36, No.3, pp. 194-197, 2020 (in Japanese).
- [4] Y. Oki, T. Arikawa, and T. Marumoto, “Report of a Project to Produce a Myoelectric Prosthetic Hand using 3D Printer,” Bulletin of Faculty of Fukuoka Medical Technology Teikyo University, No.16, pp. 67-71, 2021 (in Japanese).
- [5] O. Kashimoto, “Issues through Financial Support for the Myoelectric Upper Limb Prosthesis under the Services and Supports for Persons with Disabilities Act,” J. of Occupational Medicine and Traumatology, Vol.61, No.5, pp. 305-308, 2013 (in Japanese).
- [6] Y. Tanaka, “Current Status and Future Prospects of Myoelectric Prostheses,” J. of the Japanese Society of Prosthetics and Orthotics, Vol.34, No.2, pp. 110-114, 2018 (in Japanese).
- [7] T. Tsuji, A. Furui, and G. Nakamura, “Electromyographic Interface Technology and Robotic Arm Prostheses,” J. of the Japan Society for Precision Engineering, Vol.83, No.11, pp. 1110-1113, 2017 (in Japanese).
- [8] S. Ahmed, A. Almusawi, B. Yilmaz, and N. Dogru, “Design and Multichannel Electromyography System-based Neural Network Control of a Low-cost Myoelectric Prosthesis Hand,” J. of Mechanical Sciences, Vol.12, No.1, pp. 69-83, 2021.
- [9] M. Yoshikawa, “Three-fingered Electric Prosthetic Hand Produced with a 3D Printer,” J. of the Japanese Society of Prosthetics and Orthotics, Vol.32, No.3, pp. 154-159, 2016 (in Japanese).
- [10] M. Yoshikawa and N. Kawashima, “Commercialization and Promotion of Electric Prosthetic Hand “Finch”,” J. of the Robotics Society of Japan, Vol.38, No.2, pp. 131-134, 2020 (in Japanese).
- [11] M. Yoshikawa, “Upper Limb Prostheses Developed with Digital Fabrication Tools,” J. of the Japanese Society of Prosthetics and Orthotics, Vol.34, No.2, pp. 115-118, 2018 (in Japanese).
- [12] A. Mohammadi, J. Lavranos, H. Zhou, R. Mutlu, G. Alici, Y. Tan, P. Choong, and D. Oetomo, “A Practical 3D-printed Soft Robotic Prosthetic Hand with Multi-articulating Capabilities,” J. of Plos One, Vol.15, No.5, pp. 1-23, 2020.
- [13] I. Nicolas, C. Pylatiuk, S. Schulz, A. Kargov, R. Oberle, and T. Werner, “The Fluidhand III: A Multifunctional Prosthetic Hand,” J. of Prosthetics and Orthotics, Vol.21, No.2, pp. 91-96, 2009.
- [14] D. Riet, R. Stopforth, G. Bright, and O. Diegel, “The Low Cost Design of a 3D printed Multi-fingered Myoelectric Prosthetic Hand,” J. of Mechatronics: Principles, Technologies and Applications, Ch.4, pp. 85-117, 2015.
- [15] H. Yamashita, T. Doi, Y. Yamada, T. Nomura, and T. Noritsugu, “Development of a Prosthetic Terminal Device using Pneumatic Artificial Muscle,” Proc. of the 2019 JSME Conf. on Robotics and Mechatronics, 2A1B05, 2019 (in Japanese).
- [16] S. Yamaguchi and H. Tomori, “Development of Human Like Robotic Hand using Pneumatic Artificial Rubber Muscle,” Proc. of 329th Research Meeting on the Society of Instrument and Control Engineers Tohoku Chapter, pp. 1-5, 2020 (in Japanese).
- [17] Z. Wang, A. Wada, Y. Mori, and S. Kawamura, “Development of Pneumatic Soft Robotic Hands using 3D Printer,” J. of the Robotics Society of Japan, Vol.39, No.4, pp. 298-301, 2021 (in Japanese).
- [18] K. Nishikawa, K. Hirata, and M. Takaiwa, “Development of Self-Powered Pneumatic Prosthetic Hand with Tactile Feedback,” Trans. of the Japan Fluid Power System Society, Vol.49, No.2, pp. 56-63, 2018 (in Japanese).
- [19] R. Fujino, “Above Knee Prosthesis for Ascending / Descending Stairs with no External Energy Source,” J. of the Society of Instrument and Control Engineers, Vol.57, No.9, 663, 2018 (in Japanese).
- [20] M. Takaiwa and T. Noritsugu, “Development of Energy Autonomous Type Pneumatic Walking Support Shoes,” J. Robot. Mechatron., Vol.21, No.3, pp. 353-358, 2009.
- [21] M. Takaiwa and S. Yamashina, “Development of Self-powered Pneumatic Walking Assistance Device Intended for Diabetics,” Proc. of the 2019 JSME Conf. on Robotics and Mechatronics, 2A1-C16, 2019 (in Japanese).
- [22] A. Sano, “Unpowered Walking Assistance Device by using Ingeniously a Gravitational Field,” J. of the Robotics Society of Japan, Vol.38, No.2, pp. 139-142, 2020 (in Japanese).
- [23] K. Okuyama, “500g workwear to assist unpowered, human-powered excavation,” Nikkei Construction, Vol.745, p. 26, 2020 (in Japanese).
- [24] K. Nishikawa, K. Hirata, and M. Takaiwa, “Development of Pneumatically Driven Hand Capable of Grasping Flexible Objects,” J. Robot. Mechatron., Vol.32, No.5, pp. 923-930, 2020.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.