Paper:
Vacuum End Effector Equipped with an Expansion and Contraction Mechanism Using a Wound Thin Metal Plate
Junya Tanaka
Corporate Research & Development Center, Toshiba Corporation
1 Komukai Toshiba-cho, Saiwai-ku, Kawasaki-shi, Kanagawa 212-8582, Japan

We propose a vacuum end effector with an expansion and contraction mechanism to realize a picking task for objects placed in a narrow space, such as a shelf. The proposed expansion and contraction mechanism consists of a tube and exoskeleton structure and is characterized by the use of a thin metal plate wound about itself to form a tubular exoskeleton. Expansion and contraction motions were realized by connecting the tube to a linear motion mechanism. The expansion and contraction mechanism can be easily extended by elastic force. In addition, the shape of the expansion and contraction mechanism is created by winding a thin metal plate around a predetermined axis, which ensures high rigidity even in the extended state. Even when an object to be picked from a shelf is located behind other objects, the end effector can efficiently hold the object because of its elongated shape and ability to freely change the position of the suction pad using a direction-changing linkage and the expansion and contraction mechanism. The developed end effector weighs about 1.46 kg and can carry a load of 0.56 kg when extended to 150 mm. Verification of the mechanism confirmed that the developed end effector is useful because it can perform the expected object-picking operation.
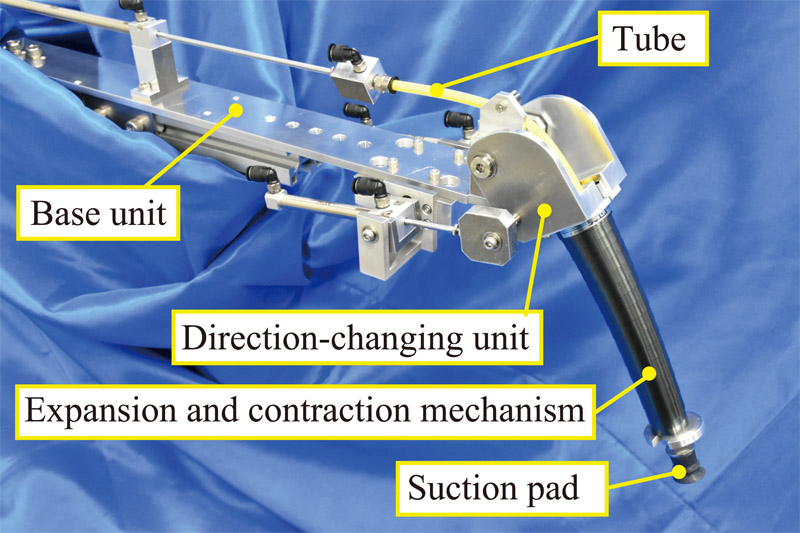
Appearance of the developed end effector
- [1] Y. Domae, “Recent Trends in the Research of Industrial Robots and Future Outlook,” J. Robot. Mechatron., Vol.31, No.1, pp. 57-62, doi: 10.20965/jrm.2019.p0057, 2019.
- [2] M. Fujita, Y. Domae, A. Noda, G. A. Garcia Ricardez, T. Nagatani, A. Zeng, S. Song, A. Rodriguez, A. Causo, I. M. Chen, and T. Ogasawara, “What are the important technologies for bin picking? Technology analysis of robots in competitions based on a set of performance metrics,” Advanced Robotics, Vol.34, No.7-8, pp. 560-574, 2020.
- [3] D. Morrison et al., “Cartman: The Low-Cost Cartesian Manipulator that Won the Amazon Robotics Challenge,” 2018 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 7757-7764, 2018.
- [4] A. Zeng et al., “Robotic Pick-and-Place of Novel Objects in Clutter with Multi-Affordance Grasping and Cross-Domain Image Matching,” 2018 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3750-3757, 2018.
- [5] A. Causo et al., “A Robust Robot Design for Item Picking,” 2018 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 7421-7426, 2018.
- [6] H. Nakamoto, M. Ohtake, K. Komoda, A. Sugahara, and A. Ogawa, “A Gripper System for Robustly Picking Various Objects Placed Densely by Suction and Pinching,” 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 6093-6098, 2018.
- [7] R. Sakai, S. Katsumata, T. Miki, T. Yano, W. Wei, Y. Okadome, N. Chihara, N. Kimura, Y. Nakai, I. Matsuo, and T. Shimizu, “A mobile dual-arm manipulation robot system for stocking and disposing of items in a convenience store by using universal vacuum grippers for grasping items,” Advanced Robotics, Vol.34, No.3-4, pp. 219-234, 2020.
- [8] H. Tsuji, M. Shii, S. Yokoyama, Y. Takamido, Y. Murase, S. Masaki, and K. Ohara, “Reusable robot system for display and disposal tasks at convenience stores based on a SysML model and RT Middleware,” Advanced Robotics, Vol.34, No.3-4, pp. 250-264, 2020.
- [9] G. A. Garcia Ricardez, S. Okada, N. Koganti, A. Yasuda, P. M. Uriguen Eljuri, T. Sano, P.-C. Yang, L. El Hafi, M. Yamamoto, J. Takamatsu, and T. Ogasawara, “Restock and straightening system for retail automation using compliant and mobile manipulation,” Advanced Robotics, Vol.34, No.3-4, pp. 235-249, 2020.
- [10] S. Hasegawa, K. Wada, K. Okada, and M. Inaba, “A Three-Fingered Hand with a Suction Gripping System for Warehouse Automation,” J. Robot. Mechatron., Vol.31, No.2, pp. 289-304, doi: 10.20965/jrm.2019.p0289, 2019.
- [11] R. Fukui, K. Kawae, Y. Kato, and M. Nakao, “Rail Structure Supporting Mechanism Using Foamable Resin for Pillar Expansion, Anchoring, and Fixation,” J. Robot. Mechatron., Vol.28, No.2, pp. 129-137, doi: 10.20965/jrm.2016.p0129, 2016.
- [12] T. Yamaguchi, Y. Sorioka, S. Park, and S. Hashimoto, “SIEN: Telescopic-Arm Climbing-Support Robot,” J. Robot. Mechatron., Vol.21, No.5, pp. 621-627, doi: 10.20965/jrm.2009.p0621, 2009.
- [13] K. Suzumori, “New Robotics Pioneered by Fluid Power,” J. Robot. Mechatron., Vol.32, No.5, pp. 854-862, doi: 10.20965/jrm.2020.p0854, 2020.
- [14] F. Xu and H. Wang, “Soft Robotics: Morphology and Morphology-inspired MotionStrategy,” IEEE/CAA J. of Automatica Sinica, Vol.8, No.9, pp. 1500-1522, 2021.
- [15] T. Aoki and S. Hirose, “Development of Slime Robot Using Bridle Bellows,” J. Robot. Mechatron., Vol.16, No.3, pp. 286-292, doi: 10.20965/jrm.2004.p0286, 2004.
- [16] J. Tanaka, A. Ogawa, H. Nakamoto, T. Sonoura, and H. Eto, “Suction pad unit using a bellows pneumatic actuator as a support mechanism for an end effector of depalletizing robots,” Robomech J., Vol.7, Article No.2, 2020.
- [17] N. Endo, Y. Kizaki, and N. Kamamichi, “Flexible Pneumatic Bending Actuator for a Robotic Tongue,” J. Robot. Mechatron., Vol.32, No.5, pp. 894-902, doi: 10.20965/jrm.2020.p0894, 2020.
- [18] N. Saito, D. Furukawa, T. Satoh, and N. Saga, “Development of Semi-Crouching Assistive Device Using Pneumatic Artificial Muscle,” J. Robot. Mechatron., Vol.32, No.5, pp. 885-893, doi: 10.20965/jrm.2020.p0885, 2020.
- [19] V. Falkenhahn, A. Hildebrandt, R. Neumann, and O. Sawodny, “Dynamic Control of the Bionic Handling Assistant,” IEEE/ASME Trans. on Mechatronics, Vol.22, No.1, pp. 6-17, 2017.
- [20] P. Yuan, G. Kawano, and H. Tsukagoshi, “Design and Modeling of Soft Pneumatic Helical Actuator with High Contraction Ratio,” J. Robot. Mechatron., Vol.32, No.5, pp. 1061-1070, doi: 10.20965/jrm.2020.p1061, 2020.
- [21] K. Nishikawa, K. Hirata, and M. Takaiwa, “Development of Pneumatically Driven Hand Capable of Grasping Flexible Objects,” J. Robot. Mechatron., Vol.32, No.5, pp. 923-930, doi: 10.20965/jrm.2020.p0923, 2020.
- [22] J. Tanaka and N. Matsuhira, “Disposable Robotic Finger Driven Pneumatically by Flat Tubes and a Hollow Link Mechanism,” J. Robot. Mechatron., Vol.32, No.5, pp. 958-976, doi: 10.20965/jrm.2020.p0958, 2020.
- [23] X. Shan and L. Birglen, “Modeling and analysis of soft robotic fingers using the fin ray effect,” The Int. J. of Robotics Research, Vol.39, No.14, pp. 1686-1705, 2020.
- [24] C.-H. Liu, T.-L. Chen, C.-H. Chiu, M.-C. Hsu, Y. Chen, T.-Y. Pai, W.-G. Peng, and Y.-P. Chiang, “Optimal design of a soft robotic gripper for grasping unknown objects,” Soft Robotics, Vol.5, No.4, pp. 452-465, 2018.
- [25] C.-H. Liu, M.-C. Hsu, T.-L. Chen, and Y. Chen, “Optimal Design of a Compliant Constant-Force Mechanism to Deliver a Nearly Constant Output Force Over a Range of Input Displacements,” Soft Robotics, Vol.7, No.6, pp. 758-769, 2020.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.