Letter:
Soft Microrobot for Embryo Transfer in Assisted Reproductive Technology
Susumu Koseki*1, Kazuhiro Kawamura*2, Futoshi Inoue*3, and Masashi Ikeuchi*1,*4
*1Graduate School of Information Science and Technology, The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-0033, Japan
*2Department of Medicine, School of Medicine, International University of Health and Welfare
4-3 Kozunomori, Narita-shi, Chiba 286-8686, Japan
*3Kitazato Corporation, Japan
1-1-8 Shibadaimon, Minato-ku, Tokyo 105-0012, Japan
*4Institute of Biomaterials and Bioengineering, Tokyo Medical and Dental University
2-3-10 Kanda-Surugadai, Chiyoda-ku, Tokyo 101-0062, Japan

This letter proposes a novel therapeutic approach in assisted reproductive technology (ART) to control the implantation position of after embryo transfer. The system composed of a soft microrobot, a catheter, and a guiding magnet. The microrobot accommodates and transports an embryo into the patient’s uterus and keeps the embryo within the suitable area for implantation. The proposed treatment was demonstrated with the prototype in an obstetric model. This minimally invasive system will increase the pregnancy rate and prevent ectopic pregnancy.
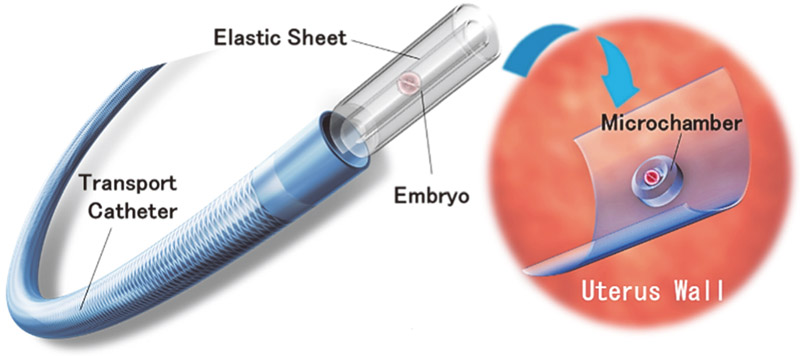
Microrobot transferring an embryo for implantation
- [1] W. B. Schoolcraft, “Importance of embryo transfer technique in maximizing assisted reproductive outcomes,” Fertility and Sterility, Vol.105, No.4, pp. 855-860, 2016.
- [2] P. R. Brezina, R. Anchan, and W. G. Kearns, “Preimpantation genetic testing for aneuploidy: what technology should you use and what are differences?,” J. Assit. Reprod. Genet., Vol.33, pp. 823-832, 2016.
- [3] A. Simon and N. Laufer, “Assessment and treatment of repeated implantation failure (RIF),” Assisted Reproduction Technologies, Vol.29, pp. 1227-1239, 2012.
- [4] A. Servant, F. Qiu, M. Mazza, K. Kostarelos, and B. J. Nelson, “Controlled in vivo swimming of a swarm of bacteria-like microrobotic flagella,” Adv. Mater., Vol.27, pp. 2981-2988, 2015.
- [5] P. Tirgar-Bahnamiri and S. Bagheri-Khoulenjani, “Biodegradable microrobots for targeting cell delivery,” Medical Hypothesis, Vol.102, pp. 56-60, 2017.
- [6] E. Diller and M. Sitti, “Three-dimensional programmable assembly by untethered magnetic robotic micro-grippers,” Adv. Funct. Mater., Vol.24, pp. 4397-4404. 2014.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.