Letter:
Biohybrid Soft Robots Driven by Contractions of Skeletal Muscle Tissue
Yuya Morimoto and Shoji Takeuchi
Department of Mechano-Informatics, Graduate School of Information Science and Technology, The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan

In this letter, we introduce biohybrid robots powered by skeletal muscle tissue. Culturing myoblast-laden extracellular matrix structures enables the construction of skeletal muscle tissue in vitro. Biohybrid robots constructed by the integration of such fabricated muscle tissue with robot skeletons have achieved various movements, according to the configuration of the skeleton. We believe that biohybrid robots will increasingly become available in the field of robotics.
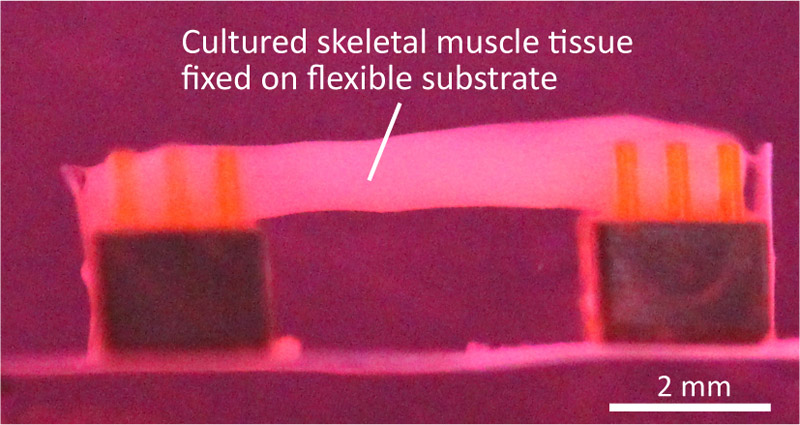
Biohybrid soft robot driven by muscle tissue contractions
- [1] L. Ricotti, B. Trimmer, A. W. Feinberg, R. Raman, K. K. Parker et al., “Biohybrid actuators for robotics: A review of devices actuated by living cells,” Sci. Robot., Vol.2, eaaq0495, 2017.
- [2] I. W. Hunter and S. Lafontaine, “A comparison of muscle with artificial actuators,” IEEE Solid-State Sensor Actuat. Workshop, pp. 178-185, 1992.
- [3] L. Ricotti and A. Menciassi, “Bio-hybrid muscle cell-based actuators,” Biomed. Microdevices, Vol.14, pp. 987-998, 2012.
- [4] S. Hinds, W. N. Bian, R. G. Dennis, and N. Bursac, “The role of extracellular matrix composition in structure and function of bioengineered skeletal muscle,” Biomaterials, Vol.32, pp. 3575-3583, 2011.
- [5] A. S. T. Smith, S. Passey, L. Greensmith, V. Mudera, and M. P. Lewis, “Characterization and optimization of a simple, repeatable system for the long term in vitro culture of aligned myotubes in 3D,” J. Cell. Biochem., Vol.113, pp. 1044-1053, 2012.
- [6] Y. Morimoto, M. Kato-Negishi, H. Onoe, and S. Takeuchi, “Three-dimensional neuron-muscle constructs with neuromuscular junctions,” Biomaterials, Vol.34, pp. 9413-9419, 2013.
- [7] Y. Morimoto, H. Onoe, and S. Takeuchi, “A swimming robot actuated by cultured skeletal muscle tissue,” Trans. of JSME, Vol.86, 20-00180, 2020 (in Japanese).
- [8] C. Cvetkovic, R. Raman, V. Chan, B. J. Williams, M. Tolish et al., “Three-dimensionally printed biological machines powered by skeletal muscle,” P. Natl. Acad. Sci. USA, Vol.111, pp. 10125-10130, 2014.
- [9] Y. Morimoto, H. Onoe, and S. Takeuchi, “Biohybrid device with antagonistic skeletal muscle tissue for measurement of contractile force,” Adv. Robot., Vol.33, pp. 208-218, 2019.
- [10] Y. Morimoto, H. Onoe, and S. Takeuchi, “Biohybrid robot with skeletal muscle tissue covered with a collagen structure for moving in air,” APL Bioeng., Vol.4, 026101, 2020.
- [11] Y. Morimoto, H. Onoe, and S. Takeuchi, “Biohybrid robot powered by an antagonistic pair of skeletal muscle tissues,” Sci. Robot., Vol.3, eaat4440, 2018.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.