Letter:
From a Deployable Soft Mechanism Inspired by a Nemertea Proboscis to a Robotic Blood Vessel Mechanism
Kenjiro Tadakuma*, Masaru Kawakami**, and Hidemitsu Furukawa**
*Graduate School of Information Sciences, Tohoku University
6-6-01 Aramaki Aza Aoba, Aoba-ku, Sendai, Miyagi 980-8579, Japan
**Department of Mechanical Systems Engineering, Yamagata University
4-3-16 Jonan, Yonezawa, Yamagata 992-8510, Japan

In this project, we aim to establish a design theory as well as implementation methods for deformable robot mechanisms that can branch and change in shape, structure, and stiffness. As the first step in our research on this project, we present an initial prototype of a branched torus mechanism that uses an inflatable structure inspired by a nemertea proboscis. We develop a basic mechanical model of this proboscis structure, and we confirm the basic performance and effective functionality of the configuration experimentally using a real prototype, specifically, a deployable torus mechanism and a retractable torus mechanism with an incompressible fluid. In addition, as an expanded concept from the branched torus mechanism, robotic blood vessels that can have an active self-healing function are prototyped, and the basic performance of the actual prototype is confirmed through experiments.
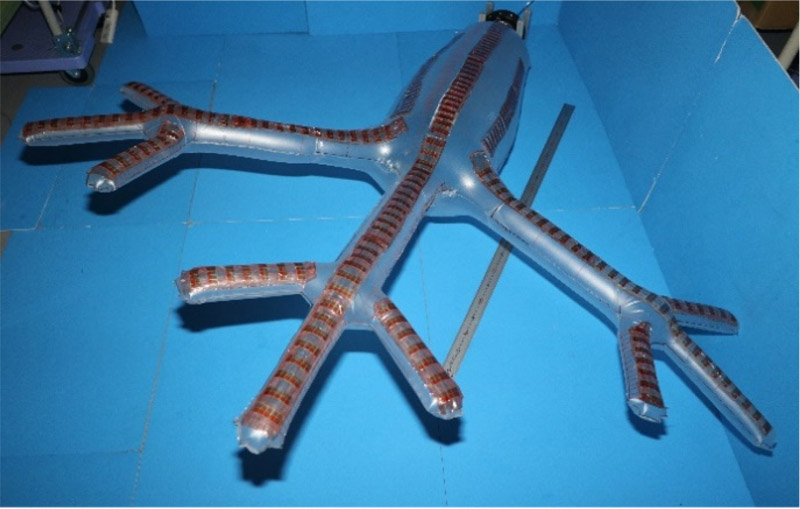
Nemertea proboscis inspired branched torus mechanism
- [1] D. Mishima, T. Aoki, and S. Hirose, “Development of pneumatically controlled expandable arm for search in the environment with tight access,” Proc. of Int. Conf. on Field and Service Robotics (FSR2003), pp. 315-320, 2003.
- [2] C. T. Loh and H. Tsukagoshi, “Pneumatic big-hand gripper with slip-in tip aimed for the transfer support of the human body,” IEEE Int. Conf. on Robotics and Automation, 2014.
- [3] L. H. Blumenschein, L. T. Gan, J. A. Fan, A. M. Okamura, and E. W. Hawkes, “A tip-extending soft robot enables reconfigurable and deployable antennas,” IEEE Robotics and Automation Letters, Vol.3, No.2, pp. 949-956, Apr. 2018.
- [4] C. Lucarotti, M. Totaro, A. Sadeghi, B. Mazzolai, and L. Beccai, “Revealing bending and force in a soft body through a plant root inspired approach,” Scientific Reports, doi: 10.1038/srep08788, 2015.
- [5] MD N. I. Shiblee, K. Ahmed, A. Khosla, M. Kawakamiab, and H. Furukawa, “3D printing of shape memory hydrogels with tunable mechanical properties,” Soft Matter, Vol.14, pp. 7809-7817, 2018.
- [6] S. Terryn et al., “Self-healing soft pneumatic robots,” Science Robotics, Vol.2, No.9, eaan4268, 2017.
- [7] S. R. White et al., “Autonomic healing of polymer composites,” Nature, Vol.409, No.6822, pp. 794-797, 2001.
- [8] X. Chen et al., “A thermally re-mendable cross-linked polymeric material,” Science, Vol.295, No.5560, pp. 1698-1702, 2002.
- [9] N. G. Cheng et al., “Thermally tunable, self-healing composites for soft robotic applications,” Macromolecular Materials and Engineering, Vol.299, No.11, pp. 1279-1284, 2014.
- [10] R. A. Bilodeau and R. K. Kramer, “Self-healing and damage resilience for soft robotics: A review,” Frontiers in Robotics and AI, Vol.4, 48, 2017.
- [11] R. V. Martinez et al., “Soft actuators and robots that are resistant to mechanical damage,” Advanced Functional Materials, Vol.24, No.20, pp. 3003-3010, 2014.
- [12] S. Terryn et al., “Development of a self-healing soft pneumatic actuator: A first concept,” Bioinspiration & Biomimetics, Vol.10, No.4, 046007, 2015.
- [13] S. Terryn et al., “Toward self-healing actuators: A preliminary concept,” IEEE Trans. on Robotics, Vol.32, No.3, pp. 736-743, 2016.
- [14] K. Nagaya et al., “Tire with self-repairing mechanism,” JSME Int. J., Series C, Mechanical Systems, Machine Elements and Manufacturing, Vol.49, No.2, pp. 379-384, 2006.
- [15] K. S. Toohey et al., “Self-healing materials with microvascular networks,” Nature Materials, Vol.6, No.8, pp. 581-585, 2007.
- [16] K. S. Toohey et al., “Delivery of two-part self-healing chemistry via microvascular networks,” Advanced Functional Materials, Vol.19, No.9, pp. 1399-1405, 2009.
- [17] B. J. Blaiszik et al., “Self-healing polymers and composites,” Annual Review of Materials Research, Vol.40, pp. 179-211, 2010.
- [18] C. J. Hansen et al., “Accelerated self-healing via ternary interpenetrating microvascular networks,” Advanced Functional Materials, Vol.21, No.22, pp. 4320-4326, 2011.
- [19] L. M. Dean et al., “Enhanced mixing of microvascular self-healing reagents using segmented gas–liquid flow,” ACS Applied Materials & Interfaces, Vol.10, No.38, pp. 32659-32667, 2018.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.