Letter:
Durable Pneumatic Artificial Muscles with Electric Conductivity for Reliable Physical Reservoir Computing
Ryo Sakurai*, Mitsuhiro Nishida*, Taketomo Jo*, Yasumichi Wakao**, and Kohei Nakajima***
*Soft-Robotics Business Development Department, Bridgestone Corporation
3-1-1 Ogawahigashi-cho, Kodaira, Tokyo 187-0031, Japan
**Advanced Materials Division, Bridgestone Corporation
3-1-1 Ogawahigashi-cho, Kodaira, Tokyo 187-0031, Japan
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan

A McKibben-type pneumatic artificial muscle (PAM) is a soft actuator that is widely used in soft robotics, and it generally exhibits complex material dynamics with nonlinearity and hysteresis. In this letter, we propose an extremely durable PAM containing carbon black aggregates and show that its dynamics can be used as a computational resource based on the framework of physical reservoir computing (PRC). By monitoring the information processing capacity of our PAM, we verified that its computational performance will not degrade even if it is randomly actuated more than one million times, which indicates extreme durability. Furthermore, we demonstrate that the sensing function can be outsourced to the soft material dynamics itself without external sensors based on the framework of PRC. Our study paves the way toward reliable information processing powered by soft material dynamics.
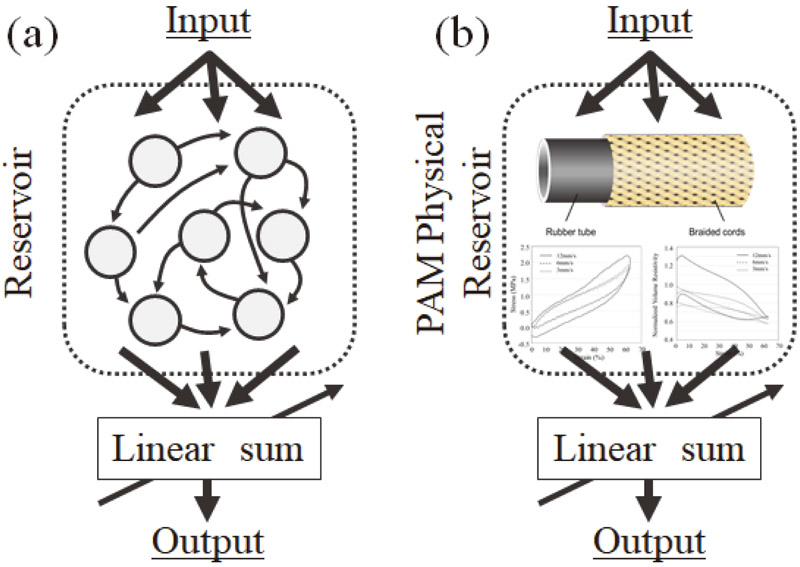
Schematic diagram of (a) RC and (b) PAM PRC
- [1] J. Hughes, U. Culla, F. Giardina, F. Guenther, A. Rosendo, and F. Iida, “Soft Manipulators and Grippers: A Review,” Frontiers in Robotics and AI, Vol.3, 2016.
- [2] T. Kurogi and Y. Yonehara, “Development of a Measurement Device Using a Sheet Stretch Sensor for Chest Wall Motion,” J. of the Society of Instrument and Control Engineers, Vol.55, No.4, pp. 348-357, 2018.
- [3] A. Yamamoto, H. Nakamoto, Y. Oki, Y. Fujimoto, Y. Bessho, and A. Ishikawa, “Development of Tactile Display System Using e-Rubber,” The Japanese J. of Rehabilitation Medicine, Vol.59, No.11, pp. 857-858, 2020.
- [4] Y. Suwa, S. Chiba, M. Waki, and T. Yanagisawa, “Evaluations on drive ability and electric generating capacity of EPAM,” Proc. of the Conf. of the Japan Institute of Energy, Vol.17, pp. 260-261, 2008.
- [5] K. Nakajima, “Physical reservoir computing – an introductory perspective,” Japanese J. of Applied Physics, Vol.59, 060501, 2020.
- [6] Y. Wakao, R. Sakurai, H. Kitano, and K. Nakajima, “Object Recognition Using the Deformation Dynamics of Polyurethane Foam,” Proc. of 2021 Int. Symposium on Micro-NanoMechatronics and Human Science (MHS), 2021.
- [7] K. Tanaka, S.-H. Yang, Y. Tokudome, Y. Minami, Y. Lu, T. Arie, S. Akita, K. Takei, and K. Nakajima, “Flapping-wing dynamics as a natural detector of wind direction,” Advanced Intelligent Systems, Vol.3, 2000174, 2021.
- [8] H. Sumioka, K. Nakajima, K. Sakai, T. Minato, and M. Shiomi, “Wearable tactile sensor suit for natural body dynamics extraction: case study on posture prediction based on physical reservoir computing,” Proc. of 2021 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 9481-9488, 2021.
- [9] T. Kawase, T. Miyazaki, T. Kanno, K. Tadano, Y. Nakajima, and K. Kawashima, “Pneumatic Reservoir Computing for Sensing Soft Body: Computational Ability of Air in Tube and Its Application to Posture Estimation of Soft Exoskeleton,” Sensors and Materials, Vol.33, No.8, pp. 2803-2824, 2021.
- [10] K. Tanaka, Y. Tokudome, Y. Minami, S. Honda, T. Nakajima, K. Takei, and K. Nakajima, “Self-organization of remote reservoirs: transferring computation to spatially distant locations,” Advanced Intelligent Systems, 2100166, 2021.
- [11] E. A. Torres, K. Nakajima, and I. S. Godage, “Information Processing Capability of Soft Continuum Arms,” Proc. of 2019 2nd IEEE Int. Conf. on Soft Robotics (RoboSoft), pp. 441-447, 2019.
- [12] Y. Yamanaka, T. Yaguchi, K. Nakajima, and H. Hauser, “Mass-Spring Damper Array as a Mechanical Medium for Computation,” Lecture Notes in Computer Science, Vol.11141, Int. Conf. on Artificial Neural Networks (ICANN2018), pp. 781-794, Springer, Cham., 2018.
- [13] K. Nakajima, H. Hauser, T. Li, and R. Pfeifer, “Exploiting the Dynamics of Soft Materials for Machine Learning,” Soft Robotics, Vol.5, No.3, pp. 339-347, 2018.
- [14] K. Nakajima, H. Hauser, T. Li, and R. Pfeifer, “Information processing via physical soft body,” Scientific Reports, Vol.5, 10487, 2015.
- [15] K. Nakajima, T. Li, H. Hauser, and R. Pfeifer, “Exploiting short-term memory in soft body dynamics as a computational resource,” J. of the Royal Society Interface, Vol.11, No.100, 20140437, 2014.
- [16] K. Nakajima, H. Hauser, R. Kang, E. Guglielmino, D. G. Caldwell, and R. Pfeifer, “A Soft Body as a Reservoir: Case Studies in a Dynamic Model of Octopus-Inspired Soft Robotic Arm,” Frontiers in Computational Neuroscience, Vol.7, 91, 2013.
- [17] K. Nakajima, H. Hauser, R. Kang, E. Guglielmino, D. G. Caldwell, and R. Pfeifer, “Computing with a Muscular-Hydrostat System,” Proc. of 2013 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1496-1503, 2013.
- [18] K. Nakajima, K. Inoue, Y. Kuniyoshi, S. Somlor, T. P. Tomo, and A. Schmitz, “Exploiting the Deformation Dynamics of Soft Materials as an Information Processing Device,” The J. of the Institute of Electronics, Information and Communication Engineers, Vol.102, No.2, pp. 121-126, 2019.
- [19] K. Nakajima, K. Inoue, Y. Kuniyoshi, S. Somlor, T. P. Tomo, and A. Schmitz, “Soft Keyboard: A Novel User Interface for Soft Devices,” Proc. of Int. Symposium on Nonlinear Theory and its Applications (NOLTA2018), pp. 147-150, 2018.
- [20] K. Nakajima, T. Li, and N. Akashi, “Soft timer: dynamic clock embedded in soft body,” Robotic Systems and Autonomous Platforms: Advances in Materials and Manufacturing (Woodhead Publishing in Materials), pp. 181-196, 2018.
- [21] Y. Horii, K. Inoue, S. Nishikawa, K. Nakajima, R. Niiyama, and Y. Kuniyoshi, “Physical reservoir computing in a soft swimming robot,” Proc. of the 2021 Conf. on Artificial Life (ALIFE 2020), 92, 2021.
- [22] P. Bhovad and S. Li, “Physical reservoir computing with origami and its application to robotic crawling,” Scientific Reports, Vol.11, No.1, pp. 1-18, 2021.
- [23] M. Eder, F. Hisch, and H. Hauser, “Morphological computation-based control of a modular, pneumatically driven, soft robotic arm,” Advanced Robotics, Vol.32, No.7, pp. 375-385, 2018.
- [24] K. Caluwaerts, J. Despraz, A. Işçen, A. P. Sabelhaus, J. Bruce, B. Schrauwen, V. SunSpiral, “Design and control of compliant tensegrity robots through simulation and hardware validation,” J. of the Royal Society Interface, Vol.11, No.98, 20140520, 2014.
- [25] Q. Zhao, K. Nakajima, H. Sumioka, H. Hauser, and R. Pfeifer, “Spine dynamics as a computational resource in spine-driven quadruped locomotion,” Proc. of 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 1445-1451, 2013.
- [26] Y. Fukahori, “Carbon Black Reinforcement of Rubber,” Nippon Gomu Kyokaishi, Vol.77, Issue 5, pp. 180-185, 2004.
- [27] K. Yamaguchi, J. J. C. Busfield, and A. G. Thomas, “Electrical and Mechanical Behavior of Filled Elastomers. I. The Effect of Strain,” J. of Polymer Science, Part B: Polymer Physics, Vol.41, pp. 2079-2089, 2003.
- [28] J. J. Busfield, A. G. Thomas, and K. Yamaguchi, “Electrical and Mechanical Behavior of Filled Rubber. III. Dynamic Loading and the Rate of Recovery,” J. of Polymer Science, Part B: Polymer Physics, Vol.43, pp. 1649-1661, 2005.
- [29] R. Sakurai, M. Nishida, H. Sakurai, Y. Wakao, N. Akashi, Y. Kuniyoshi, Y. Minami, and K. Nakajima, “Emulating a sensor using soft material dynamics: A reservoir computing approach to pneumatic artificial muscle,” Proc. of 2020 3rd IEEE Int. Conf. on Soft Robotics (RoboSoft), pp. 710-717, 2020.
- [30] H. F. Schulte, “The Characteristics of the McKibben Artificial Muscle, The Application of External Power in Prosthetics and Orthotics,” Publication 874, National Academy of Sciences–National Research Council, Washington D.C., Appendix H, pp. 94-115, 1961.
- [31] S. Krishna, T. Nagarajan, and A. M. A. Rani, “Review of Current Development of Pneumatic Artificial Muscle,” J. of Applied Science, Vol.11, pp. 1749-1755, 2011.
- [32] T. Abe, S. Koizumi, H. Nabae, G. Endo, K. Suzumori, N. Sato, M. Adachi, and F. Takamizawa, “Fabrication of ‘18 Weave’ Muscles and their Application to Soft Power Support Suit for Upper Limbs Using Thin McKibben Muscle,” 2019 IEEE Int. Conf. on Soft Robotics (Robosoft 2019), Seoul, Apr. 16, 2019.
- [33] S. Koizumi, S. Kurumaya, H. Nabae, G. Endo, and K. Suzumori, “Braiding Thin McKibben Muscles to Enhance their Contracting Abilities,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Madrid, Oct. 1, 2018.
- [34] T. Kanno, D. Morisaki, R. Miyazaki, and G. Endo, “A Walking Assistive Device with Intention Detection using Back-driven Pneumatic Artificial Muscles,” Proc. of the 2015 IEEE 11th Int. Conf. on Rehabilitation Robotics, Singapore, pp. 565-570, 2015.
- [35] T. V. Minh, T. Tjahjowidodo, H. Ramon, and H. V. Brussel, “A new approach to modeling hysteresis in a pneumatic artificial muscle using the Maxwell-slip model,” IEEE/ASME Trans. on Mechatronics, Vol.16, No.1, March 2011.
- [36] S. Kuriyama, M. Ding, and Y. Kurita, “J. Ueda and Tsukasa Ogasawara, Flexible Sensor for McKibben Pneumatic Artificial Muscle Actuator,” Int. J. Automation Technol. Vol.3, No.6, pp. 731-740, 2009.
- [37] N. C. Goulbourne, S. Son, and J. W. Fox, “Self-Sensing McKibben Actuators Using Dielectric Elastomer Sensors,” Proc. of SPIE, Vol.6524, Electroactive Polymer Actuators and Devices (EAPAD) 2007, 2007.
- [38] H. Jaeger, “The echo state approach to analysing and training recurrent neural networks, gMD-Report 148,” GMD-German National Research Institute for Computer Science, 2001.
- [39] W. Maass, T. Nätschlager, and H. Markram, “Real-time computing without stable states: A new framework for neural computation based on perturbations,” Neural Computation, Vol.14, pp. 2531-2560, 2002.
- [40] K. Nakajima and I. Fischer, “Reservoir Computing: Theory, Physical Implementations, and Applications,” Springer Nature, 2021.
- [41] W. Sun, N. Akashi, Y. Kuniyoshi, and K. Nakajima, “Physics-informed reservoir computing with autonomously switching readouts: a case study in pneumatic artificial muscles,” Proc. of 2021 Int. Symposium on Micro-NanoMechatronics and Human Science (MHS), 2021.
- [42] J. Kuwabara, K. Nakajima, R. Kang, D. T. Branson, E. Guglielmino, D. G. Caldwell, and R. Pfeifer, “Timing-Based Control via Echo State Network for Soft Robotic Arm,” Proc. of the 2012 Int. Joint Conf. on Neural Networks (IJCNN), 2012.
- [43] T. Li, K. Nakajima, and R. Pfeifer, “Online Learning Technique for Behavior Switching in a Soft Robotic Arm,” Proc. of 2013 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1288-1294, 2013.
- [44] T. Li, K. Nakajima, M. Cianchetti, C. Laschi, and R. Pfeifer, “Behavior Switching by Using Reservoir Computing for a Soft Robotic Arm,” Proc. of 2012 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 4918-4924, 2012.
- [45] T. Li, K. Nakajima, M. Calisti, C. Laschi, and R. Pfeifer, “Octopus-Inspired Sensorimotor Control of a Multi-Arm Soft Robot,” Proc. of 2012 Int. Conf. on Mechatronics and Automation (ICMA), pp. 948-955, 2012.
- [46] K. Nakajima, N. Schmidt, and R. Pfeifer, “Measuring Information Transfer in a Soft Robotic Arm,” Bioinspiration & Biomimetics, Vol.10, No.3, 035007, 2015.
- [47] N. Akashi, T. Yamaguchi, S. Tsunegi, T. Taniguchi, M. Nishida, R. Sakurai, Y. Wakao, and K. Nakajima, “Input-driven bifurcations and information processing capacity in spintronics reservoirs,” Physical Review Research, Vol.2, 043303, 2020.
- [48] S. Kan, K. Nakajima, T. Asai, and M. Akai-Kasaya, “Physical Implementation of Reservoir Computing through Electrochemical Reaction,” Advanced Science, 2104076, 2021.
- [49] J. Dambre, D. Verstraeten, S. Schrauwen, and S. Massar, “Information processing capacity of dynamical systems,” Sci. Rep., Vol.2, 514, 2012.
- [50] T. Kubota, H. Takahashi, and K. Nakajima, “Unifying framework for information processing in stochastically driven dynamical systems,” Physical Review Research, Vol.3, 043135, 2021.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.