Paper:
Development of Haptic Pointing Devices Under the Variable Admittance Control Theory
Toru Tsumugiwa, Gen Asai, Atsushi Kamiyoshi, and Ryuichi Yokogawa
Department of Biomedical Engineering, Faculty of Life and Medical Sciences, Doshisha University
1-3 Tatara Miyakodani, Kyotanabe, Kyoto 610-0394, Japan

The pointing operation using a mouse is widely implemented as a method for an operator to intuitively operate a pointer on a display. However, the dynamic characteristics of the pointing operation and pointer movement, such as inertia and viscosity, cannot be adjusted using ordinary pointing devices. As an alternative to a mouse pointing system, in this study, we propose a novel haptic pointing system in which the dynamic characteristics of the pointing operation and pointer movement can be adjusted using a robot manipulator under mechanical variable admittance control. The dynamic characteristics of the robot motion and pointer movement are varied sequentially during the pointing operation by varying the inertial and viscosity parameters of the proposed admittance control strategy using a mechanical device attached to the robot manipulator. The experiment was conducted to reveal the effectiveness of adjusting the pointer movement dynamics by modifying the pointer movement control loop and the ratio of the operating force with respect to the amount of pointer movement. The experimental results demonstrated that the performance of the pointing operation was improved by appropriately adjusting the pointer movement dynamics.
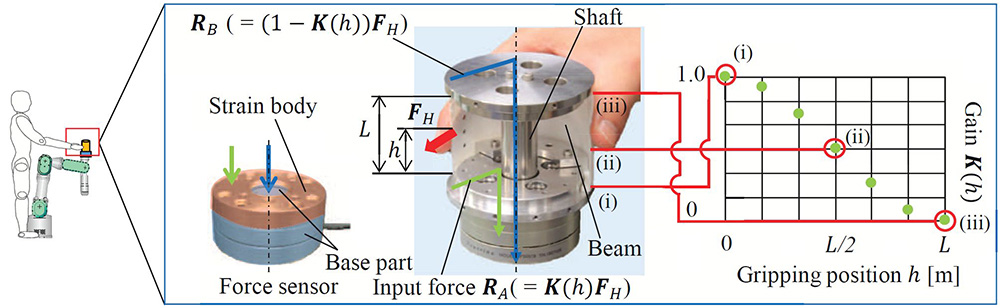
Overview of variable admittance control mechanism
- [1] V. M. Hung and U. Joo, “Tele-Operation of a 6-DOF Serial Robot Using a New 6-DOF Haptic Interface,” IEEE Int. Symp. on Haptic Audio Visual Environments and Games, pp. 1-6, doi: 10.1109/HAVE.2010.5623986, 2010.
- [2] K. Moran, B. Li, C. Bernal-Cardenas, D. Jelf, and D. Poshyvanyk, “Automated Reporting of GUI Design Violations for Mobile Apps,” Proc. of the 40th Int. Conf. on Software, pp. 165-175, doi: 10.1145/3180155.3180246, 2018.
- [3] L. Zhao and D. Gao, “GUI Test Case Generation Based on Activity-Flow Graph,” Proc. of the 7th IEEE Int. Conf. on Software Engineering and Service Science, pp. 738-741, doi: 10.1109/ICSESS.2016.7883173, 2016.
- [4] K. Moran, B. Li, C. Bernal-Cardenas, D. Jelf, and D. Poshyvanyk, “Automated Reporting of GUI Design Violations for Mobile Apps,” Proc. of the 40th Int. Conf. on Software, pp. 165-175, doi: 10.1145/3180155.3180246, 2018.
- [5] A. Cook, M. Meng, J. Gu, and K. Howery, “Development of a Robotic Device for Facilitating Learning by Children Who Have Severe Disabilities,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.10, No.3, pp. 178-187, doi: 10.1109/TNSRE.2002.802877, 2002.
- [6] Y. Tanaka and T. Fujimoto, “sMouse: A Development of the Analog Operability of Computer Mouse,” Proc. of the 7th Int. Congress on Advanced Applied Informatics, pp. 895-900, doi: 10.1109/IIAI-AAI.2018.00181, 2018.
- [7] H. C. Chen, C. L. Chen, C. C. Lu, and C. Y. Wu, “Pointing Device Usage Guidelines for People with Quadriplegia: A Simulation and Validation Study Utilizing an Integrated Pointing Device Apparatus,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.17, No.3, pp. 279-286, doi: 10.1109/TNSRE.2009.2014234, 2009.
- [8] P. Isokoski, R. Raisamo, B. Martin, and G. Evreinov, “User Performance with Trackball-mice,” Interacting with Computers, Vol.19, No.3, pp. 407-427, doi: 10.1016/j.intcom.2006.10.003, 2007.
- [9] T. Aswathi, S. Athira, G. Sowrabiya, and M. K. Shanilia, “A paradigm of Sixth Sense: Finger Cursor,” Proc. of the 2nd Int. Conf. on Intelligent Computing, Instrumentation and Control Technologies, pp. 1558-1562, doi: 10.1109/ICICICT46008.2019.8993112, 2019.
- [10] R. Nahid, H. Sohorab, and M. Ahmad, “Real Time Mouse Cursor Control Based on Bare Finger Movement Using Webcam to Improve HCI,” Proc. of 2015 Int. Conf. on Electrical Engineering and Information Communication Technology, pp. 1-5, doi: 10.1109/ICEEICT.2015.7307391, 2015.
- [11] J. P. Kristine, R. Raisamo, M. R. Jorgina, and M. E. Karen, “Microcontroller based Foot-Operated Mouse using a Sensor Pad as an Alternative to a Conventional Mouse,” Proc. of 2016 Advanced Information Management, Communicates, Electronic and Automation Control Conf., pp. 1434-1437, doi: 10.1109/IMCEC.2016.7867451, 2016.
- [12] R. G. Bozomitu, A. V. Cehan, and C. Rotariu, “Methods of Conttol Improvement in an Eye Tracking Based Human-Computer Interface,” Proc. of the 23rd Int. Symp. for Design and Technology in Electronic Packaging, pp. 300-303, doi: 10.1109/SIITME.2017.8259912, 2017.
- [13] N. Nappenfeld and G. Giefing, “Applying Fitts’ Law to a Brain-Computer Interface Controlling a 2D Pointing Device,” Proc. of Int. Conf. on Systems, pp. 90-95, doi: 10.1109/SMC.2018.00025, 2018.
- [14] K. Souza, M. Seruffo, H. Mello, D. Souza, and M. Vellasco, “User Experience Evaluation using Mouse Tracking and Artificial Intelligence,” IEEE Access, Vol.1, pp. 1-10, doi: 10.1109/ACCESS.2019.2927860, 2019.
- [15] Y. Aydin, O. Tokatli, V. Patoglu, and C. Basdogan, “Stable Physical Human Robot Interaction Using Fractional Order Admittance Control,” IEEE Trans. on Haptics, Vol.11, No.3, pp. 464-475, doi: 10.1109/TOH.2018.2810871, 2018.
- [16] Y. Tsumaki, H. Naruse, D. N. Nenchev, and M. Uchiyama, “Design of a Compact 6-DOF Haptic Interface,” Proc. of 1998 IEEE Int. Conf. on Robotics and Automation, pp. 2580-2585, doi: 10.1109/ROBOT.1998.680730, 1998.
- [17] S. Devie, P. Robet, Y. Aoustin, and M. Gautier, “Impedance Control Using a Cascaded Loop Force Control,” IEEE Robotics and Automation Letters, pp. 1-7, doi: 10.1109/LRA.2018.2801472, 2018.
- [18] N. Hogan, “Impedance Control part 1 - part 3,” J. of Dynamic Systems, Measurement, and Control, Vol.107, pp. 1-24, 1985.
- [19] V. M. Hung and U. Joo, “Tele-Operation of a 6-DOF Serial Robot Using a New 6-DOF Haptic Interface,” Proc. of Int. Symp. on Haptic Audio Visual Environments and Games, pp. 1-6, doi: 10.1109/HAVE.2010.5623986, 2010.
- [20] S. Fani, S. Ciotti, E. Battaglia, A. Moscatelli, and M. Bianchi, “W-FYD: A Wearable Fabric-Based Display for Haptic Multi-Cue Delivery and Tactile Augmented Reality,” IEEE Trans. on Haptic, Vol.11, No.2, pp. 304-316, doi: 10.1109/TOH.2017.2708717, 2018.
- [21] D. Lee, “Incremental Robot Skill Learning by Human Motion Retargeting and Physical Human Guidance,” Proc. of the 12th Int. Conf. on Ubiquitous Robots and Ambient Intelligence, pp. 585-586, doi: 10.1109/URAI.2015.7358837, 2015.
- [22] C. Pacchierotti, S. Sinclair, M. Solazzi, A. Frisoli, V. Hayward, and D. Prattichizzo, “Wearable Haptic Systems for the Fingertip and the Hand: Taxonomy, Review, and Perspectives,” IEEE Trans. on Haptics, Vol.10, No.4, pp. 580-600, doi: 10.1109/TOH.2017.2689006, 2017.
- [23] T. Tsumugiwa, M. Yura, A. Kamiyoshi, and R. Yokogawa, “Development of Mechanical Impedance Varying Mechanism in Admittance Control,” J. of Robotics and Mechatronics, Vol.30, pp. 863-872, doi: 10.20965/jrm.2018.p0863, 2018.
- [24] N. Takesue, R. Kikuue, A. Sano, H. Mochiyama, H. Sawada, and H. Fujimoto, “Force-Dependent Variable Damping Control for Positioning Task Assist,” J. of Robotics Society of Japan, Vol.25, No.2, pp. 306-313, doi: 10.7210/jrsj.25.306, 2007 (in Japanese).
- [25] T. Kondo and Y. Hayashi, “Human-Robot Cooperative Motor Learning,” J. of Robotics Society of Japan, Vol.38, No.10, pp. 895-900, doi: 10.7210/jrsj.38.895, 2020 (in Japanese).
- [26] I. S. MacKenzie, “A Note on the Information-Theoretic Basics for Fitts’ Law,” J. of Motor Behavior, pp. 323-330, doi: 10.1080/00222895.1989.10735486, 1989.
- [27] I. S. Mackenzie, “Fitts’ Law as a performance model in human-computer interaction,” Doctoral Dissertation, University of Toronto, 1991.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.