Paper:
Thermally Driven Vehicle Using Bimetal Rings
Akira Okuno, Shunsuke Yoshimoto, and Akio Yamamoto
The University of Tokyo
5-1-5 Kashiwanoha, Kashiwa, Chiba 277-8563, Japan

A two-wheeled vehicle using bimetal sheets that travels on a hot horizontal surface by using only thermal energy is proposed herein. Each wheel is wrapped with a bimetal sheet, and the deformation of the sheet causes the wheel to roll. The rolling motion is investigated based on a simple physical model to provide insights into the rolling principle and its characteristics. Subsequently, by comparing several different wheel structures, the optimal wheel structure for the vehicle is selected. The performance of the developed vehicle is tested on a hot plate whose surface temperature is 100°C higher than the ambient air temperature. It is discovered experimentally that the vehicle can travel at a speed of approximately 60 mm/s when no load is applied. The vehicle can travel by supporting a load of approximately 400 g, which is almost double its weight.
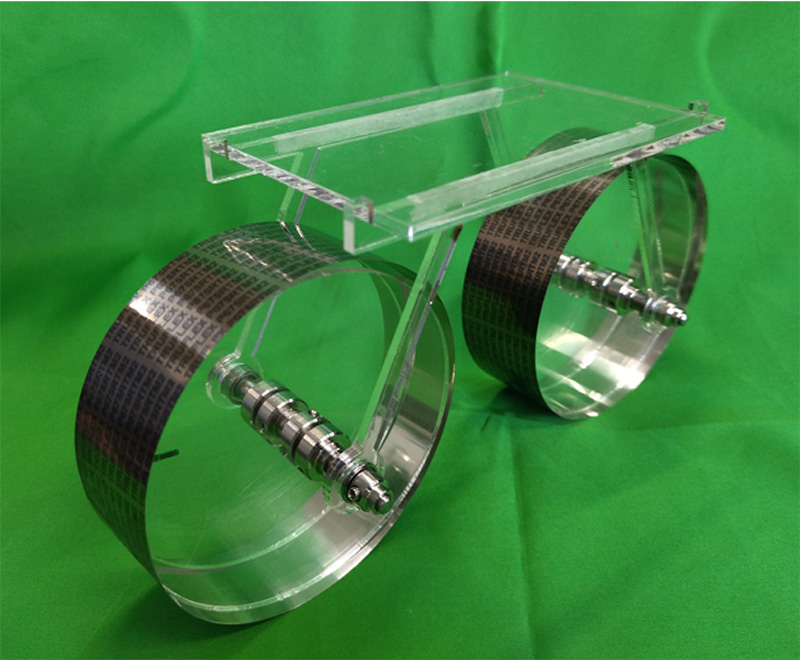
Thermally driven vehicle using bimetal sheets
- [1] A. Harb, “Energy harvesting: State-of-the-art,” Renewable Energy, Vol.36, Issue 10, pp. 2641-2654, 2011.
- [2] R. A. Kishore and S. Priya, “A review on low-grade thermal energy harvesting: Materials, methods and devices,” Materials, Vol.11, Issue 8, 1433, 2018.
- [3] M. Cansiz, D. Altinel, and G. Karabulut Kurt, “Efficiency in RF energy harvesting systems: A comprehensive review,” Energy, Vol.174, pp. 292-309, 2019.
- [4] S. K. Divakaran and D. Das Krishna, “Rf energy harvesting systems: An overview and design issues,” Int. J. of RF and Microwave Computer-Aided Engineering, Vol.29, Issue 1, e21633, 2019.
- [5] M. Safaei, H. A. Sodano, and S. R. Anton, “A review of energy harvesting using piezoelectric materials: state-of-the-art a decade later (2008-2018),” Smart Materials and Structures, Vol.28, No.11, 113001, 2019.
- [6] J. Wang, L. Geng, L. Ding, H. Zhu, and D. Yurchenko, “The state-of-the-art review on energy harvesting from flow-induced vibrations,” Applied Energy, Vol.267, 114902, 2020.
- [7] H. Zeng, O. M. Wani, P. Wasylczyk, and A. Priimagi, “Light-driven, caterpillar-inspired miniature inching robot,” Macromolecular Rapid Communications, Vol.39, Issue 1, 1700224, 2018.
- [8] H. Rodrigue, W. Wang, M.-W. Han, T. J. Y. Kim, and S.-H. Ahn, “An overview of shape memory alloy-coupled actuators and robots,” Soft Robotics, Vol.4, No.1, pp. 3-15, 2017.
- [9] T. Suehara, Y. Haradaand, T. Uemno, and T. Higuchi, “Development of a self-propelled system using thermal deformation,” Proc. of JSPE Semestrial Meeting, pp. 805-806, 2006 (in Japanese).
- [10] T. Nemoto and A. Yamamoto, “Thermobot: A bipedal walker driven by constant heating,” Proc. of 2015 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 983-988, 2015.
- [11] T. Chada, S. Yoshimoto, and A. Yamamoto, “A thermally-driven bipedal walker with rugby ball shaped feet,” Proc. of Int. Conf. of IFToMM ITALY, pp. 626-634, 2020.
- [12] Y. Tsumaki et al., “Free-fall experiments of environment-driven torquer with magnetic latch for asteroid exploration,” Proc. of the 12th Artificial Intelligence, Robotics and Automation in Space, 2014.
- [13] Y. Harada, T. Suehara, T. Uemno, and T. Higuchi, “Development of an actuator using thermal deformation,” Proc. of JSPE Semestrial Meeting, pp. 803-804, 2006 (in Japanese).
- [14] T. Nemoto and A. Yamamoto, “Prototyping a thermal walker that can walk on a hot horizontal surface with a simple gait,” ROBOMECH J., Vol.5, Issue 1, 16, 2018.
- [15] L. Su, T. Nemoto, and A. Yamamoto, “Performance of a thermal bipedal walker on inclined surfaces with different leg coms,” J. of Bionic Engineering, Vol.16, Issue 3, pp. 540-549, 2019.
- [16] T. Higuchi and T. Ueno, “Development of new actuators for special environment,” T. Higuchi, K. Suzumori, and S. Tadokoro (Eds.), “Next-Generation Actuators Leading Breakthroughs,” pp. 351-362, Springer, 2010.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.