Paper:
CameraRoach: A WiFi- and Camera-Enabled Cyborg Cockroach for Search and Rescue
Sriranjan Rasakatla*, Wataru Tenma*, Takeshi Suzuki*, Bipin Indurkhya**, and Ikuo Mizuuchi*
*Tokyo University of Agriculture and Technology
2-24-16 Nakacho, Koganei, Tokyo 184-0012, Japan
**Jagiellonian University
24 Gołębia, Kraków 31-007, Poland

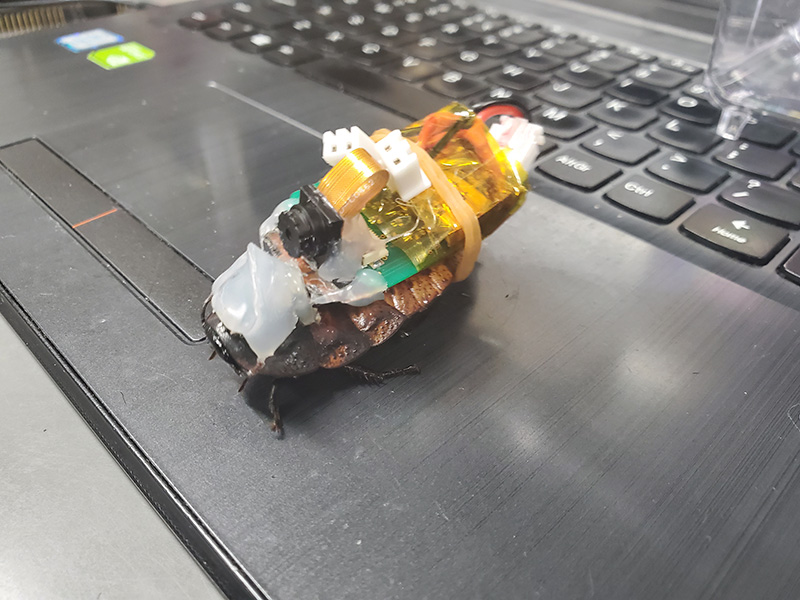
We describe here our design and implementation of a cyborg insect, called CameraRoach, with onboard camera feedback that can be navigated via remote control providing a first-person view. The camera pack is mounted on the Madagascar hissing cockroach, which is small enough to fit into crevices but also can carry a printed circuit boards with power, communication, and sensor components (visual camera). For navigating the cockroach, we implemented a unique electronic backpack neural stimulator, which allows the cockroach to be maneuvered on a desired path with a joystick. A high-resolution wireless camera, also included in the backpack, sends live images via a WiFi (Wireless Fidelity) network. We present the results of an evaluation experiment with the CameraRoach and compare it with the other state of the art systems like the Beetle-Cam.
CameraRoach for Search and Rescue
- [1] V. Iyer et al., “Wireless steerable vision for live insects and insect scale robots,” Science Robotics, Vol.5, Issue 44, eabb0839, doi:10.1126/scirobotics.abb0839, 2020.
- [2] E. Whitmire et al., “Acoustic Sensors for Biobotic Search and Rescue,” SENSORS (2014 IEEE), pp. 2195-2198, doi: 10.1109/ICSENS.2014.6985475, 2014.
- [3] R. D. Arnold et al., “Search and rescue with autonomous flying robots through behavior-based cooperative intelligence,” J. of Int. Humanitarian Action, Vol.3, 18, doi: 10.1186/s41018-018-0045-4, 2018.
- [4] H. Sato et al., “Cyborg beetle insect flight control through implantable, tetherless microsystem,” Proc. of the 2008 IEEE 21st Int. Conf. on Micro Electro Mechanical Systems, pp. 164-167, doi:10.1109/MEMSYS.2008.4443618, 2008.
- [5] T. Latif and A. Bozkurt, “Line Following Terrestrial Insect Biobots,” Proc. of the Int. Conf. of the IEEE Engineering in Medicine and Biology Society, pp. 972-975, doi: 10.1109/EMBC.2012.6346095, 2012.
- [6] C. F. Herreid II and C. R. Fourtner (Eds.), “Locomotion and Energetics in Arthropods,” Springer Science & Business Media, doi: 10.1007/978-1-4684-4064-5, 1981.
- [7] A. Dirafzoon et al., “Biobotic motion and behavior analysis in response to directional neurostimulation,” Proc. of the IEEE Int. Conf. on Acoustics, Speech and Signal Processing (ICASSP), pp. 2457-2461, doi: 10.1109/ICASSP.2017.7952598, 2017.
- [8] E. Whitmire, “Kinect-based system for automated control of terrestrial insect biobots,” Proc. of the 35th Annual Int. Conf. of the IEEE EMBS, pp. 1470-1473, 2013.
- [9] J. Cole et al., “A study on motion mode identification for cyborg roaches,” Proc. of the 2017 IEEE Int. Conf. on Acoustics, Speech and Signal Processing (ICASSP), pp. 2652-2656, doi: 10.1109/ICASSP.2017.7952637, 2017.
- [10] T. Latif et al., “Towards Fenceless Boundaries for Solar Powered Insect Biobots,” Proc. of the 36th Annual Int. Conf. of the IEEE Engineering in Medicine and Biology Society, pp. 1670-1673, doi:10.1109/EMBC.2014.6943927, 2014.
- [11] A. Dirafzoon, “Cyborg-Insect Networks for Mapping of Unknown Environments,” Proc. of the ACM/IEEE Int. Conf. on Cyber-Physical Systems (ICCPS), pp. 216-216, doi: 10.1109/ICCPS.2014.6843729, 2014.
- [12] E. Faulkner and A. Dutta, “Microcircuit Design for Real-Time Data Acquisition and Neuromuscular Control of Insect Motion,” Proc. of the 2018 Conf. on Cognitive Computational Neuroscience, PS-1A.43, doi:10.32470/CCN.2018.1207-0, 2018.
- [13] A. Dirafzoon, A. Bozkurt, and E. Lobaton, “A framework for mapping with biobotic insect networks: From local to global maps,” RAS J., Vol.88, pp. 79-96, 2016.
- [14] A. Bozkurt, E. Lobaton, and M. Sichitiu, “A Biobotic Distributed Sensor Network for Under-Rubble Search and Rescue,” Computer, Vol.49, Issue 5, pp. 38-46, doi: 10.1109/MC.2016.136, 2016.
- [15] P. T. Tran-Ngoc et al., “Insect-Computer Hybrid System for Autonomous Search and Rescue Mission,” arXiv, doi: arXiv-2105.10869, 2021.
- [16] A. Bozkurt et al., “Mems based bioelctronic neuromuscular interfaces for insect cyborg flight control,” Proc. of the 2008 IEEE 21st Int. Conf. on Micro Electro Mechanical Systems, pp. 160-163, doi: 10.1109/MEMSYS.2008.4443617, 2008.
- [17] J. Schwefel, “Wireless Communication by an Autonomous Self-Powered Cyborg Insect,” J. of The Electrochemical Society, Vol.161, No.13, pp. H3113-H3116, 2014.
- [18] K. Shoji et al., “Bio-fuel cell backpacked insect and its application to wireless sensing,” Biosensors and Bioelectronics, Vol.78, pp. 390-395, doi: 10.1016/j.bios.2015.11.077, 2016.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.