Paper:
Easy-Riding Compact Electric Shopping Vehicle
Takeharu Hayashi*, Yoshihiko Takahashi**, and Satoru Yamaguchi**
*Graduate Faculty of Interdisciplinary Research, Yamanashi University
4-4-37 Takeda, Kofu, Yamanashi 400-8510, Japan
**Department of Mechanical Systems Engineering, Graduate School of Engineering, Kanagawa Institute of Technology
1050 Shimo-Ogino, Atsugi, Kanagawa 243-0292, Japan

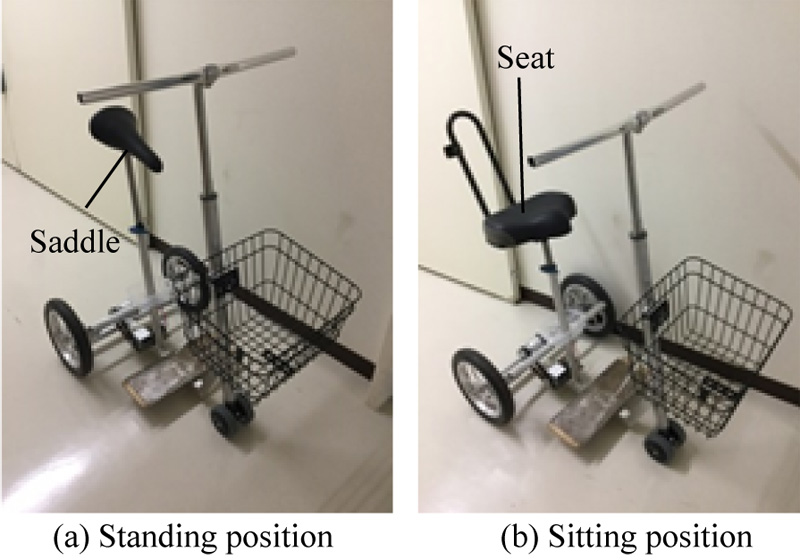
We are developing a small compact electric vehicle for shopping purposes. In this study, we fabricated an experimental vehicle, that uses only six small rechargeable AA batteries (7.2 V, approximately 2 A·h) as an electric power source. The vehicle user can select between two driving positions: standing and sitting. A compact transmission with a 90-W DC motor and a speed controller that uses pulse width modulation control was designed as an actuating system. Running experiments were conducted to observe the performance of the fabricated vehicle on a flat floor in a gymnasium. The fabricated vehicle was able to operate for 52 min at a speed of 2.73 km/h. The getting-on and getting-off processes in the vehicle were repeated many times during shopping. The human leg strain while getting on and off the vehicle was investigated by electromyogram measurement. During the getting-on and getting-off processes in the vehicle, the myoelectric potential of the quadriceps increased in the sitting position but did not increase in the standing position. The experimental results show that a user suffers more strain in the sitting position than in the standing position.
Compact electric shopping vehicle body
- [1] R. Hayashi, J. Isogai, S. Fujita, and P. Raksincharoensak, “Development of autonomous forward obstacle avoidance system by using in-wheel-motor and steering control of micro electric vehicle,” Trans. of Society of Automotive Engineers of Japan, Vol.42, No.1, pp. 87-93, 2011 (in Japanese).
- [2] M. Sato, T. Tomizawa, S. Kudoh, and T. Suehiro, “Development of danger avoidance assist system for electric cart,” J. Robot. Mechatron., Vol.25, No.6, pp. 1011-1019, 2013.
- [3] T. Fujikawa, M. Ishikawa, and S. Nakajima, “Mobility support system for personal mobility vehicles,” J. Robot. Mechatron., Vol.27, No.6, pp. 715-716, 2015.
- [4] M. Nomatsu, Y. Suganuma, Y. Yui, and Y. Uchimura, “Development of an autonomous mobile robot with self-localization and searching target in a real environment,” J. Robot. Mechatron., Vol.27, No.4, pp. 356-364, 2015.
- [5] H. Yoshida, K. Yoshida, and T. Honjo, “Path Planning Design for Boarding-Type Personal Mobility Unit Passing Pedestrians Based on Pedestrian Behavior,” J. Robot. Mechatron., Vol.32, No.3, pp. 588-597, 2020.
- [6] K. Miyawaki, “Electric Cart Matching the User Gait,” J. Robot. Mechatron., Vol.28, No.1, pp. 105-106, 2016.
- [7] T. Shinkai, N. Kumagai, T. Komatsu, M. Kawaguchi, I. Hatayama, H. Arai, K. Hayashi, E. Wu, Y. Dejun, Y. Yamazaki, O. Shimizu, and H. Shimizu, “Development of an electric vehicle ‘SIM-WIL’,” J. of Society of Automotive Engineers of Japan, Vol.66, No.9, pp. 84-88, 2012 (in Japanese).
- [8] H. Yoshida, “Development of new generation electric vehicle ‘i-MiEV’,” J. of Society of Automotive Engineers of Japan, Vol.63, No.9, pp. 11-16, 2009 (in Japanese).
- [9] H. Yoshida and K. Handa, “Development of compact electric vehicles suitable for driving at urban area,” Energy and Resources, Vol.29, No.4, pp. 211-215, 2008 (in Japanese).
- [10] H. Shimizu, K. Emoto, and K. Kawakami, “Eliica, an 8-wheel drive electric vehicle,” J. of Society of Automotive Engineers of Japan, Vol.61, No.9, pp. 83-88, 2007 (in Japanese).
- [11] H. Kimura, K. Fukuda, and A. Ikegami, “Trends of the world solar challenge 2013,” J. Japan Solar Energy Society, Vol.40, No.1, pp. 19-26, 2014 (in Japanese).
- [12] J. H. Cheng, C. Y. Yu, and V. Hsu, “Energy management algorithm for a hybrid fuel cells scooter,” IEEE Vehicle Power and Propulsion Conf., pp. 370-375, 2009.
- [13] S. Yamaguchi, T. Yamazaki, Y. Namekawa, and Y. Takahashi, “Hybrid energy control using DC-DC converter for single operator fuel cell vehicle,” IEEE Vehicle Power and Propulsion Conf., pp. 1188-1193, 2012.
- [14] T. Yamazaki, Y. Namekawa, S. Yamaguchi, and Y. Takahashi, “Dual drive train for single operator fuel cell vehicle,” IEEE Vehicle Power and Propulsion Conf., pp. 1182-1187, 2012.
- [15] Y. Namekawa, S. Yamaguchi, T. Yamazaki, and Y. Takahashi, “Running management of single operator fuel cell vehicle,” IEEE Vehicle Power and Propulsion Conf., pp. 1176-1181, 2012.
- [16] Y. Takahashi, “Ultra light weight fuel cell electrical vehicle (UL-FCV),” IEEE Int. Symp. on Industrial Electronics, pp. 189-194, 2009.
- [17] Y. Takahashi, H. Sasai, M. Sakaguchi, and R. Matsumoto, “Concept design of series hybrid electric vehicle using vegetable oil,” J. Japan Solar Energy Society, Vol.40, No.1, pp. 13-18, 2014 (in Japanese).
- [18] T. Hayashi and Y. Takahashi, “Small compact standing ride-type electric vehicle for shopping,” Int. Conf. on Control, Automation and Systems – IEEE Conf. Publications, pp. 238-243, 2016.
- [19] T. Hayashi and Y. Takahashi, “Small compact electric vehicle for practical use and its repeated start-stop tests,” Int. Conf. on Control, Automation and Systems – IEEE Conf. Publications, pp. 113-118, 2015.
- [20] T. Hayashi and Y. Takahashi, “Development of small compact electric motor tricycle for shopping,” Int. Conf. on Control, Automation and Systems – IEEE Conf. Publications, pp. 710-715, 2014.
- [21] M. Uchida and H. Ide, “The control method for the robot hand based on the fuzzy theory,” J. Robot. Mechatron., Vol.4, No.4, pp. 262-267, 1992.
- [22] Y. Takahashi, G. Manabe, K. Takahashi, and T. Hatakeyama, “Basic study on self-transfer aid robotic system,” J. Robot. Mechatron., Vol.18, No.1, pp. 4-10, 2006.
- [23] K. Taoda, H. Tsujimura, T. Kitahara, and K. Nishiyama, “Evaluation of a swiveling seat to reduce the physical load on forklift drivers,” Japan Society for Occupational Health, Vol.44, No.5, pp. 180-187, 2002 (in Japanese).
- [24] A. Seo, T. Sakamoto, K. Doi, Y. Kikuchi, M. Nakano, and S. Okada, “Influence of tractor brake-pedal position on right lower leg load,” J. of the Society of Agricultural Machinery, Vol.71, No.2, pp. 53-59, 2009 (in Japanese).
- [25] Y. Matsumoto, M. Seki, T. Ando, Y. Kobayashi, Y. Nakashima, H. Iijima, M. Nagaoka, and M. G. Fujie, “Development of an exoskeleton to support eating movements in patients with essential tremor,” J. Robot. Mechatron., Vol.25, No.6, pp. 949-958, 2013.
- [26] T. Hatsukari, N. Miyase, J. Higuchi, Y. Hirata, and K. Kosuge, “Standing-up motion support device by using elbow support face to adapt to human physical and motion characteristics,” J. Robot. Mechatron., Vol.20, No.6, pp. 828-835, 2008.
- [27] M. Tsukamoto, T. Kondo, and K. Ito, “A prosthetic hand control based on nonstationary EMG at the start of movement,” J. Robot. Mechatron., Vol.19, No.4, pp. 381-387, 2007.
- [28] M. Sato and Y. Koike, “Stiffness teaching and motion assist system using functional electrical stimulation and electromyogram signals,” J. Robot. Mechatron., Vol.16, No.5, pp. 446-455, 2004.
- [29] T. Oshima, T. Fujikawa, and M. Kumamoto, “Coordination control of arm using antagonistic actuators,” J. Robot. Mechatron., Vol.14, No.3, pp. 270-277, 2002.
- [30] H. Tanaka, Y. Nakazono, and H. Ide, “A study on quantification of weight sensation by EMG,” J. Robot. Mechatron., Vol.9, No.5, pp. 406-411, 1997.
- [31] M. Uchida and H. Ide, “Control of a robot arm by electromyogram – Recognition of arm motion by neural network,” J. Robot. Mechatron., Vol.8, No.4, pp. 372-377, 1996.
- [32] T. Abe, T. Koike, K. Furukawa, A. Ochi, T. Oshima, and T. Fujikawa, “Parallel Linkage Function of the Rectus Femoris when Standing Up,” Robotics Society of Japan., Vol.32, No.2, pp. 190-197, 2014 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.