Paper:
Inter-Module Physical Interactions: A Force-Transmissive Modular Structure for Whole-Body Robot Motion
Shiqi Yu, Yoshihiro Nakata, Yutaka Nakamura, and Hiroshi Ishiguro
Graduate School of Engineering Science, Osaka University
1-3 Machikaneyama-cho, Toyonaka, Osaka 560-8531, Japan

Robots are required to be significantly compliant and versatile to work in unstructured environments. In a number of studies, robots have positively exploited the environments during interactions and completed tasks from a morphological viewpoint. Modular robots can help realize real-world adaptive robots. Researchers have been investigating the actuation, coupling, and communication mechanisms among these robots to realize versatility. However, the diverse force transmission among modules needs to be further studied to achieve the adaptive whole-body dynamics of a robot. In this study, we fabricated a modular robot and proposed the realization of force transmission on this robot, by constructing fluid transferable network systems on the actuation modules. By exploiting the physical property variations of the modular robot, our experimental results prove that the robot’s motion can be changed by switching the connection pattern of the system.
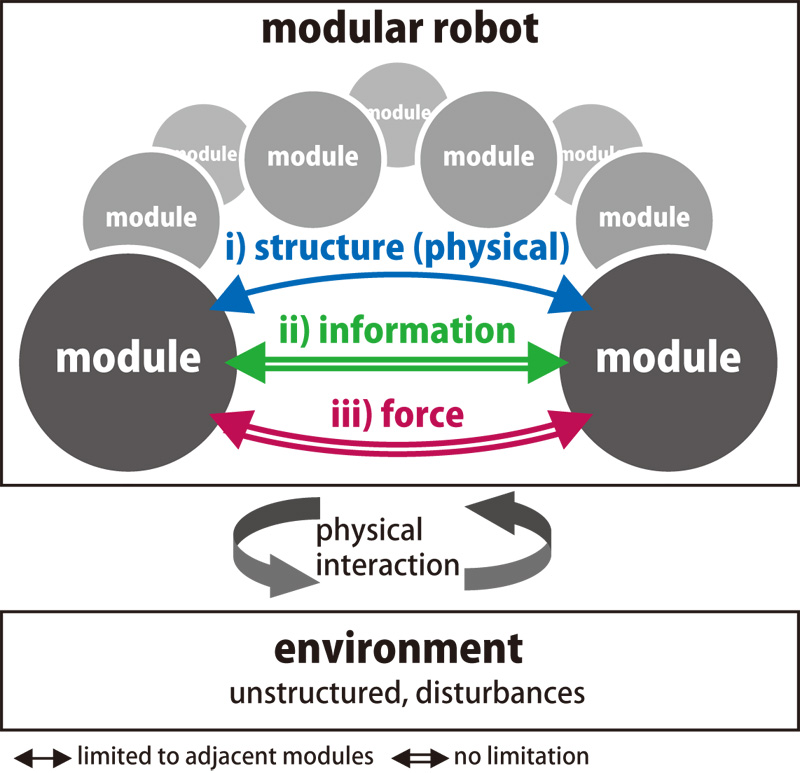
Propose of force transmission between a modular robot
- [1] L. Cousineau and N. Miura, “Construction robots: the search for new building technology in Japan,” ASCE Publications, 1998.
- [2] G. Pratt and J. Manzo, “The DARPA robotics challenge [competitions],” IEEE Robotics & Automation Magazine, Vol.20, No.2, pp. 10-12, 2013.
- [3] A. K. Pandey and R. Gelin, “A mass-produced sociable humanoid robot: pepper: the first machine of its kind,” IEEE Robotics & Automation Magazine, Vol.25, No.3, pp. 40-48, 2018.
- [4] K. Chen, M. Kamezaki, T. Katano, T. Kaneko, K. Azuma, T. Ishida, M. Seki, K. Ichiryu, and S. Sugano, “Compound locomotion control system combining crawling and walking for multi-crawler multi-arm robot to adapt unstructured and unknown terrain,” ROBOMECH J., Vol.5, No.1, 2018.
- [5] L. Sentis and O. Khatib, “A whole-body control framework for humanoids operating in human environments,” Proc. of 2006 IEEE Int. Conf. on Robotics and Automation, pp. 2641-2648, 2006.
- [6] H. Ishiguro, “Android Science,” M. Kasaki, H. Ishiguro, M. Asaka, M. Osaka, and T. Fujikado (Eds.), “Cognitive Neuroscience Robotics A: Synthetic Approaches to Human Understanding,” pp. 193-234, Springer, 2016.
- [7] A. A. Hopgood, “Artificial intelligence: hype or reality?,” Computer, Vol.36, No.5, pp. 24-28, 2003.
- [8] K. Kutsuzawa, S. Sakaino, and T. Tsuji, “A Control System for a Tool Use Robot: Drawing a Circle by Educing Functions of a Compass,” J. Robot. Mechatron., Vol.29, No.2, pp. 395-405, 2017.
- [9] R. Pfeifer and J. Bongard, “How the body shapes the way we think: a new view of intelligence,” MIT Press, 2006.
- [10] S. Collins, A. Ruina, R. Tedrake, and M. Wisse, “Efficient bipedal robots based on passive-dynamic walkers,” Science, Vol.307, No.5712, pp. 1082-1085, 2005.
- [11] M. Yim, Y. Zhang, and D. Duff, “Modular Robots,” IEEE Spectrum, Vol.39, No.2, pp. 30-34, 2002.
- [12] Y. Morooka and I. Mizuuchi, “Gravity Compensation Modular Robot: Proposal and Prototyping,” J. Robot. Mechatron., Vol.31, No.5, pp. 697-706, 2019.
- [13] H. Kurokawa, K. Tomita, A. Kamimura, S. Kokaji, T. Hasuo, and S. Murata, “Distributed self-reconfiguration of M-TRAN III modular robotic system,” The Int. J. of Robotics Research, Vol.27, No.3-4, pp. 373-386, 2008.
- [14] M. Shimizu, K. Takuma, M. Lungarella, and A. Ishiguro, “Adaptive modular robots through heterogeneous inter-module connections,” J. Robot. Mechatron., Vol.20, No.3, pp. 386-393, 2008.
- [15] K. Nakagaki, S. Follmer, A. Dementyev, J. A. Paradiso, and H. Ishii, “Designing Line-Based Shape-Changing Interfaces,” IEEE Pervasive Computing, Vol.16, No.4, pp. 36-46, 2017.
- [16] M. G. Catalano, G. Grioli, M. Garabini, F. Bonomo, M. Mancini, N. Tsagarakis, and A. Bicchi, “VSA-CubeBot: A modular variable stiffness platform for multiple degrees of freedom robots,” 2011 IEEE Int. Conf. on Robotics and Automation, pp. 5090-5095, 2011.
- [17] K. Hongo, Y. Nakanishi, M. Yoshida, I. Mizuuchi, and M. Inaba, “Development of bilateral wearable device kento for control robots using muscle-actuator modules,” J. Robot. Mechatron., Vol.22, No.3, pp. 308-314, 2010.
- [18] S. Yu, Y. Nakata, Y. Nakamura, and H. Ishiguro, “A design of robotic spine composed of parallelogram actuation modules,” Artificial Life and Robotics, Vol.22, No.4, pp. 477-482, 2017.
- [19] H. Ryu, Y. Nakata, Y. Nakamura, and H. Ishiguro, “Adaptive Whole-Body Dynamics: An Actuator Network System for Orchestrating Multijoint Movements,” IEEE Robotics & Automation Magazine, Vol.23, No.3, pp. 85-92, 2016.
- [20] A. S. Ramalho, Y. Nakamura, Y. Nakata, and H. Ishiguro, “Design strategy for robotic spines of Androids with a natural postural appearance,” 2016 IEEE-RAS 16th Int. Conf. on Humanoid Robots (Humanoids), pp. 312-317, 2016.
- [21] L. Iocchi, D. Nardi, and M. Salerno, “Reactivity and Deliberation: A Survey on Multi-Robot Systems,” M. Hannebauer, J. Wendler, and E. Pagello (Eds.), “Balancing Reactivity and Social Deliberation in Multi-Agent Systems,” pp. 9-32, Springer, 2001.
- [22] J. P. Whitney, T. Chen, J. Mars, and J. K. Hodgins, “A hybrid hydrostatic transmission and human-safe haptic telepresence robot,” 2016 IEEE Int. Conf. on Robotics and Automation, pp. 690-695, 2016.
- [23] A. Schiele, P. Letier, R. Van Der Linde, and F. Van Der Helm, “Bowden cable actuator for force-feedback exoskeletons,” 2006 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3599-3604, 2006.
- [24] A. d’Avella, A. Portone, L. Fernandez, and F. Lacquaniti, “Control of Fast-Reaching Movements by Muscle Synergy Combinations,” J. of Neuroscience, Vol.26, No.30, pp. 7791-7810, 2006.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.