Paper:
An Electrolarynx Control Method Using Myoelectric Signals from the Neck
Katsutoshi Oe
Department of Mechanical Systems Engineering, Daiichi Institute of Technology
1-10-2 Kokubu-chuo, Kirishima, Kagoshima 899-4395, Japan

Patients who have lost vocal cord function due to laryngeal cancer or laryngeal injury are incapable of speech because it is impossible to generate the laryngeal tone from which the voice originates. For such patients, various speech production substitutes have been devised and put into practical use. The electrolarynx is one of these speech production substitutes and it can be used with relative ease. However, the sound is sometimes difficult to hear and its quality is monotonous. Therefore, focusing on the control method to improve the articulation of the electrolarynx, we have proposed an electrolarynx controlled by myoelectric signals of the neck. The sternohyoid muscle, which is located in the superficial layer of the neck, was the source of the myoelectric signals. This muscle is active during speech, and its activity increases mainly at the time of speech in a low voice. We succeeded in detecting the surface myoelectric signals of the sternohyoid muscle and performing on/off control of the electrolarynx by signal processing. This report includes the derivation of a control function for converting into a control signal of the fundamental frequency of the electrolarynx from the relationship between the myoelectric signals and the fundamental frequency of the voice. This report also includes an evaluation of the controllability of the electrolarynx by comparing the obtained control signal with the user’s intention. Regarding the control of the fundamental frequency, we have proposed a method of control in three stages – high, medium, and low – and a method of control in two stages – high and low – and compared their performances. The results of the three-stage control indicated that the use of the logarithm as a control function for converting the myoelectric signals into the fundamental frequency of the electrolarynx succeeded in the control at an accuracy of 90% or more by changing the pitch of the generated sound depending on the subjects. It was also indicated that the error rate was as low as less than 20%, while maintaining a constant sound. This makes it clear that the use of the logarithm as a control function gives the highest controllability. The two-stage control exhibits a very high control success rate exceeding 90%, regardless of the type of control function; in particular, the control function using the logarithm exhibits a control success rate exceeding 95%. These results indicate that the electrolarynx control function obtained using the logarithmic function has excellent controllability.
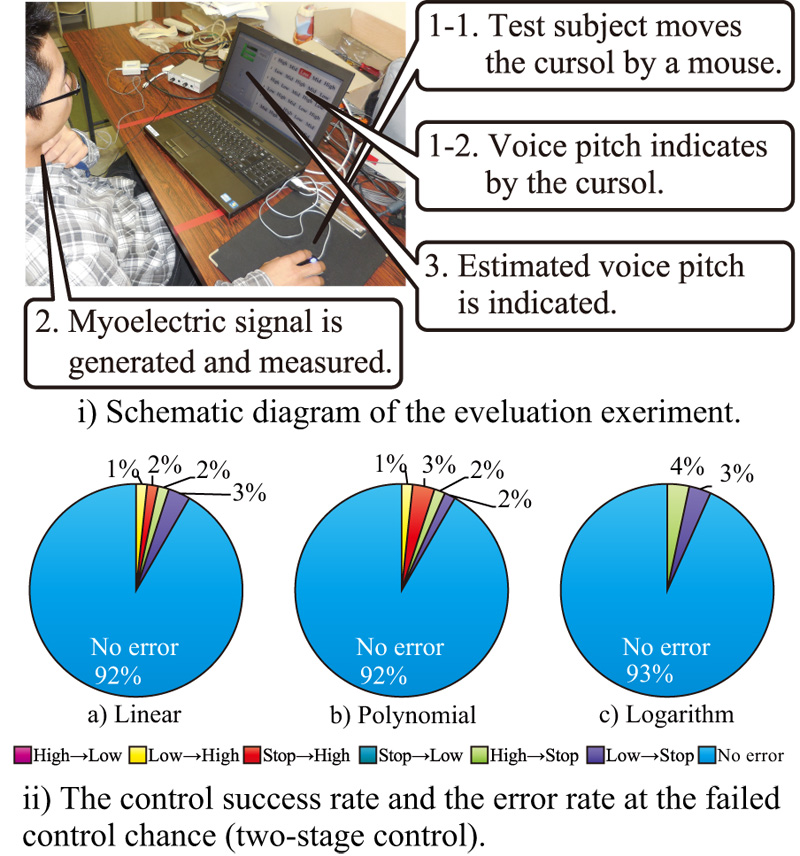
Controllability evaluation experiment
- [1] B. W. Pearson, “Subtotal laryngectomy,” Laryngoscope, Vol.91, No.11, pp. 1904-1912, 1981.
- [2] M. Kariyasu, T. Matsudaira, and M. Toyama, “Communication disorders and estimated number of persons with disabilities,” Report of Kyoto Gakuen University General Research Center, Vol.18, pp. 55-60, 2017 (in Japanese).
- [3] H. Iwashita, H. Imai, R. Namba, T. Hayabara, M. Kawai, N. Sunohara, N. Fukuhara, and T. Saida, “A guideline for the management of ALS in national hospitals,” IRYO, Vol.54. No.12, pp. 584-586, 2000 (in Japanese).
- [4] K. Tatara, H. Fukunaga, and M. Kawai, “Clinical survey of muscular dystrophy in hospitals of national hospital organization,” IRYO, Vol.60, No.2, pp. 112-118, 2006 (in Japanese).
- [5] L. D. Lowry, “Artificial larynges: A review and development of a prototype self-contained intra-oral artificial larynx,” Laryngoscope, Vol.91, pp. 1332-1355, 1981.
- [6] M. Shibusawa, “Esophageal speech in pharyngolaryngoesopha-gectomy patients,” Onseigengoigaku, Vol.31, No.3, pp. 297-302, 1990 (in Japanese).
- [7] M. Hashiba, “Commercialization and user evaluation of an electric artificial larynx with intonation control function,” J. of the Society of Biomechanisms, Vol.26, No.4, pp. 182-187, 2002 (in Japanese).
- [8] N. Uemi, T. Ifukube, M. Takahashi, and J. Matsushima, “Proposal of an electrolarynx having a pitch frequency control function and its evaluation,” Trans. Inst. Electron. Inf. Commun. Eng., Vol. J78-DII, No.3, pp. 571-578, 1995.
- [9] E. A. Goldstein et al., “Design and implementation of a hands-free electrolarynx device controlled by neck strap muscle electromyographic signal,” IEEE Trans. on Biomed., Vol.51, No.2, pp. 325-332, 2004.
- [10] K. Matsui, K. Kimura, Y. Nakatoh, and Y. O. Kato, “Development of electrolarynx with hands-free prosody control,” Proc. 8th ISCA Speech Synthesis Workshop, pp. 273-277, 2013.
- [11] Y. Kikuchi and H. Kasuya, “Development and evaluation of pitch adjustable electrolarynx,” Proc. of Speech Prosody 2004, pp. 761-764, 2004.
- [12] W. Li, Q. Zhaopeng, F. Yijun, and N. Haijun, “Design and preliminary evaluation of electrolarynx with F0 control based on capacitive touch technology,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.26, No.3, pp. 629-636, 2018.
- [13] H. Takahashi, M. Nakao, T. Okusa, Y. Hatamura, Y. Kikuchi, and K. Kaga, “A voice-generation system using an intramouth vibrator,” J. of Artificial Organs, Vol.4, No.288, doi: 10.1007/BF02480019, 2001.
- [14] K. Ooe, T. Fukuda, and F. Arai, “Proposal of artificial larynx using PZT ceramics vibrator as sound source,” J. Robot. Mechatron., Vol.12, No.3, pp. 304-309, 2000.
- [15] K. Ooe, T. Fukuda, and F. Arai, “Improvement in PZT ceramics vibrator low frequency of generated sound for using PZT ceramics vibrator as a sound source for an artificial larynx,” J. Robot. Mechatron., Vol.15, No.1, pp. 8-14, 2003.
- [16] K. Ooe, R. Kishimoto, M. Nakajima, K. Sekiyama, and T. Fukuda, “Controllable artificial larynx using neck myoelectric signal,” Proc. of 2017 Int. Symp. on Micro-NanoMechatronics and Human Science, pp. 239-243, 2012.
- [17] K. Ooe, “Development of controllable artificial larynx by neck myoelectric signal,” Procedia Engineering, Vol.47, pp. 869-872, 2012.
- [18] T. Nagano, “Japanese phonetic expression,” Tamagawa University, p. 108, Tokyo, 1995.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.