Development Report:
Perception of Vestibular Sensation During Turning Operation of Construction Machine
Koji Okuda, Youjirou Ohbatake, and Daisuke Kondo
Graduate School of Engineering, Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan

A major challenge in remote control is the reduction in work efficiency compared with on-board operation. The factors of reduction in work efficiency include a lack of information (information such as perspective, realistic sensation, vibration, and sound) compared to on-board operations. One of the factors is the lack of vestibular/somatosensory information regarding rotation. To clarify the effect of the presence of input of vestibular/somatosensory information regarding rotation on the worker’s operation, we conducted a basic laboratory experiment of a horizontal turning operation. The experimental results indicate that a response appropriate for the input of information regarding rotation can be made only with visual information; however, the reaction is delayed in the case without the input of information regarding rotation in comparison with a case with the input of information regarding rotation.
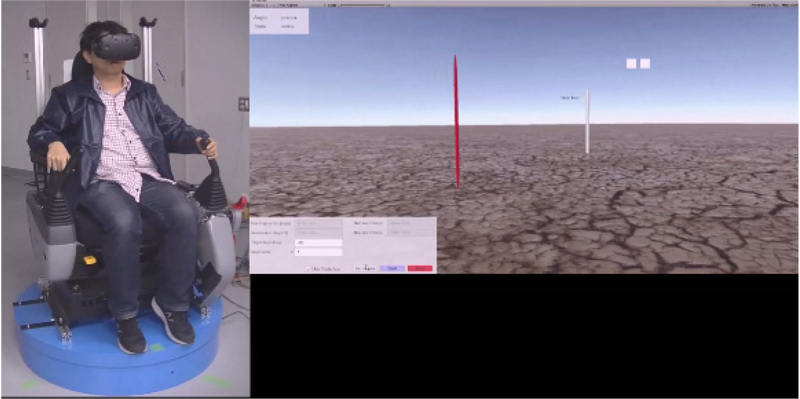
Operator uses the vestibular/somatic sensation as well as the visual sensation
- [1] Y. Nitta, “Unmanned construction technology that contributes to disaster recovery,” Civil Engineering Technology, Vol.67, No.4, pp. 16-23, 2012.
- [2] M. Ito, Y. Funahara, S. Saiki, Y. Yamazaki, and Y. Kurita, “Development of a Cross-Platform Cockpit for Simulated and Tele-Operated Excavators,” J. Robot. Mechatron., Vol.31, No.2, pp. 231-239, 2019.
- [3] S. Yuta, “Development of a Remotely Controlled Semi-Underwater Heavy Carrier Robot for Unmanned Construction Works,” J. Disaster Res., Vol.12, No.3, pp. 432-445, 2017.
- [4] S. Kitahara and K. Sudou, “Implementation of unmanned construction based on computerized construction: Completion of unmanned computerized construction system,” Construction Planning, Vol.694, pp. 48-52, 2007.
- [5] M. Furusawa, “History of Technological Development in Unmanned Construction,” NETIS Plus, Vol.2, pp. 16-23, 2011.
- [6] K. Chayama, A. Fujioka, K. Kawashima, H. Yamamoto, Y. Nitta, C. Ueki, A. Yamashita, and H. Asama, “Technology of Unmanned Construction System in Japan,” J. Robot. Mechatron., Vol.26, No.4, pp. 403-417, 2014.
- [7] Y. Koga, “Unmanned Sabo Construction at Unzen Fugendake,” J. of Japan Society of Erosion Control, Vol.52, No.4, pp. 64-68, 1999.
- [8] K. Fujino, M. Mogi, A. Nishiyama, and T. Hashimoto, “Study on Operator Mastery in Unmanned Construction,” 13th Construction Robot Symposium, pp. 69-74, 2012.
- [9] T. Tanimoto, R. Fukano, K. Shinohara, K. Kurashiki, D. Kondo, and H. Yoshinada, “Research on Superimposed Terrain Model for Teleoperation Work Efficiency,” J. Robot. Mechatron., Vol.28, No.2, pp. 173-184, 2016.
- [10] T. Kinoshita, H. Ikeda, T. Yamamoto, M. G. Machizawa, K. Tanaka, and Y. Yamazaki, “Design of a Database-Driven Kansei Feedback Control System Using a Hydraulic Excavators Simulator,” J. Robot. Mechatron., Vol.32, No.3, pp. 652-661, 2020.
- [11] T. Nagano, R. Yajima, S. Hamasaki, K. Nagatani, A. Moro, H. Okamoto, G. Yamauchi, T. Hashimoto, A. Yamashita, and H. Asama, “Arbitrary Viewpoint Visualization for Teleoperated Hydraulic Excavators,” J. Robot. Mechatron., Vol.32, No.6, pp. 1233-1243, 2020.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.